Robot Industri
Latar Belakang
Robot industri adalah perangkat mekanis yang, pada tingkat tertentu, meniru gerakan manusia. Mereka digunakan setiap kali ada kebutuhan untuk mengurangi bahaya bagi manusia, memberikan lebih banyak kekuatan atau akurasi daripada manusia, atau ketika operasi terus menerus diperlukan. Sebagian besar robot tidak bergerak, tetapi beberapa bergerak di seluruh tempat kerja mengirimkan bahan dan persediaan.
Banyak orang menganggap robot sebagai monster tipe humanoid yang terlihat dalam fiksi ilmiah dan film fantasi. Meskipun suatu hari nanti kita mungkin memiliki kemampuan teknis untuk memproduksi mesin seperti itu, robot saat ini sebenarnya adalah perangkat yang cukup sederhana. Gerakan yang kita anggap remeh—mengambil koin dari meja, misalnya—jauh lebih sulit bagi robot. Otak kita memproses ribuan bit data variabel dari mata kita untuk menginstruksikan lengan, pergelangan tangan, tangan, dan jari kita untuk meraih, menggenggam, dan mengambil koin . Bahkan sentuhan koin terus-menerus memperbarui otak kita untuk memberikan tekanan jari yang cukup untuk menggenggam koin dengan aman. Setiap variasi posisi dengan mudah dikompensasikan di otak kita. Untuk dengan mudah dan ekonomis memprogram robot industri untuk melakukan tugas yang sama, banyak dari variabel ini harus dibatasi atau dihilangkan. Posisi, jangkauan, berat, dan genggaman harus sekonsisten mungkin sehingga variasi tidak mengakibatkan benda hilang atau jatuh. Komputer yang mengendalikan robot harus diprogram oleh teknisi, untuk "mengajar" mesin untuk menyelesaikan gerakan. Area di mana robot berkinerja lebih baik daripada manusia adalah akurasi dan pengulangan. Sementara beberapa orang dapat mengambil koin dengan gerakan yang sama setiap kali, robot dapat melakukan operasi dengan gerakan yang sama persis tanpa melelahkan. Banyak robot dapat mengulangi gerakan dengan akurasi beberapa ribu inci dan beroperasi 24 jam sehari. Karena pekerjaan yang tak kenal lelah dan akurat ini, robot menjadi segmen pembelian peralatan industri yang terus berkembang. Sebagian besar digunakan untuk operasi pengecatan dan pengelasan berulang, sementara yang lain, yang dikenal sebagai robot pick-and-place, digunakan untuk mengangkat dan menempatkan produk ke dalam mesin dan paket.
Sejarah
Robot, atau "robotik", adalah segmen dari ilmu otomatisasi yang lebih luas. Otomasi menggunakan mesin dan komputer yang dapat mempelajari atau mengimbangi berbagai kondisi operasi. Istilah robot dapat ditelusuri ke kata Ceko robota, yang berarti kerja wajib. Istilah ini pertama kali muncul pada tahun 1921 dalam lakon "R.U.R." (Rossum's Universal Robots) oleh dramawan Ceko Karel Capek. Drama tersebut menggambarkan robot humanoid yang menghancurkan pembuat manusia mereka — plot yang sama dengan beberapa film thriller fiksi ilmiah modern.
Robot praktis pertama kali dicoba setelah perkembangan komputer. Pada akhir 1960-an, Stanford Research Institute merancang dan membangun robot eksperimental yang disebut "SHAKEY." Menggunakan kamera televisi dan komputer, mesin ini mampu memindahkan dan menyusun balok menjadi tumpukan. General Motors mendanai program di Massachusetts Institute of Technology pada pertengahan 1970-an untuk mengembangkan robot otomatis untuk keperluan perakitan. Di sini, peneliti Victor Scheinman menemukan PUMA (manipulator universal yang dapat diprogram untuk perakitan), dan masuknya robot ke dalam industri Amerika dimulai.
Bahan Baku
Robot sebagian besar dibangun dari bahan umum. Beberapa robot khusus untuk aplikasi ruang bersih, program luar angkasa, atau proyek "teknologi tinggi" lainnya mungkin menggunakan logam titanium dan komposit struktural serat karbon. Lingkungan operasi dan kekuatan yang dibutuhkan merupakan faktor utama dalam pemilihan material.
Baja, cor besi, dan aluminium paling sering digunakan untuk lengan dan pangkalan robot. Jika robot bergerak, mereka biasanya melengkapinya dengan ban karet untuk pengoperasian yang tenang dan cengkeraman positif di lantai. Robot mengandung sejumlah besar elektronik dan kabel, dan beberapa dikendalikan oleh radio atau laser. Silinder dan mekanisme pembangkit gerak lainnya mengandung oli hidrolik atau udara bertekanan. Selang silikon, karet, dan baja tahan karat yang dikepang menghubungkan mekanisme ini ke katup kontrolnya. Untuk melindungi robot dari lingkungan, beberapa area terbuka ditutupi dengan pelindung neoprene fleksibel dan bellow yang dapat dilipat. Motor listrik dan penggerak linier dibeli dari pemasok otomatisasi bersama dengan pengontrol, atau "otak". Pengontrol ditempatkan di lemari listrik baja yang terletak di dekat area kerja robot atau dibawa ke dalam robot itu sendiri.
Manufaktur
Proses
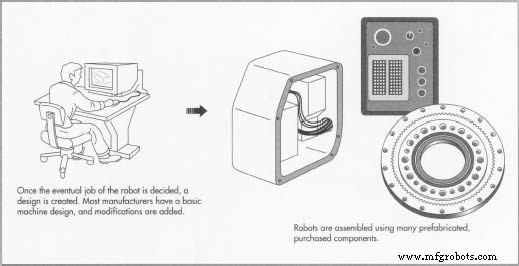
Desain
 Robot pertama yang dipasang di industri Amerika, Unimate "pick-and-place" uni) pertama melepas bagian logam panas dari mesin die-casting di pabrik GM di Trenton, New Jersey, pada tahun 1961. (Dari koleksi Museum Henry Ford &Greenfield Village.)
Robot pertama yang dipasang di industri Amerika, Unimate "pick-and-place" uni) pertama melepas bagian logam panas dari mesin die-casting di pabrik GM di Trenton, New Jersey, pada tahun 1961. (Dari koleksi Museum Henry Ford &Greenfield Village.)
Robot, seperti alat apa pun, hanya sebaik orang yang menggunakannya. Mereka tidak dapat melakukan pekerjaan yang tidak dirancang atau diprogram untuk mereka lakukan. Mereka paling efektif ketika keseluruhan sistem dan proses direncanakan dengan hati-hati. Selain itu, pekerja yang bertanggung jawab untuk mereka harus sepenuhnya dididik dan dilatih juga.
Pada 1980-an, General Motors Corporation menghabiskan lebih dari $40 miliar untuk teknologi baru, ratusan juta untuk robot. Sayangnya, perusahaan tidak menghabiskan cukup banyak untuk memahami sistem dan proses yang seharusnya direvolusi oleh robot atau pada orang-orang yang memelihara dan mengoperasikannya. Pabrik GM di Hamtramck, Michigan, seharusnya menjadi pameran bagi perusahaan. Sebaliknya, pada tahun 1988 itu adalah situs dari beberapa yang terburuk dalam utopianisme teknologi. Robot-robot di telepon kadang-kadang melukis satu sama lain daripada badan mobil yang lewat; robot terkadang lepas kendali dan menabrak kendaraan yang lewat; sebuah robot yang dirancang untuk memasang kaca depan ditemukan secara sistematis menghancurkannya. Suatu ketika, ketika robot berhenti bekerja, teknisi tidak tahu cara memperbaikinya. Panggilan tergesa-gesa ke pabrikan membawa teknisi ke pesawat berikutnya. Dia melihat robot itu, menekan tombol "Reset", dan mesin itu sekali lagi beroperasi.
William S. Pretzer
Fabrikasi
Majelis
Robot dirakit menggunakan sejumlah besar komponen yang dibeli seperti motor listrik, silinder hidrolik, bantalan, kabel, pengontrol, dan bagian penting lainnya. Robot industri dapat berisi 2.000 bagian individu dan dirakit oleh tim. Tim-tim ini mulai dari pangkalan, dan merakit komponen ke dalam robot hingga selesai dan siap untuk pengujian dan penyelesaian.
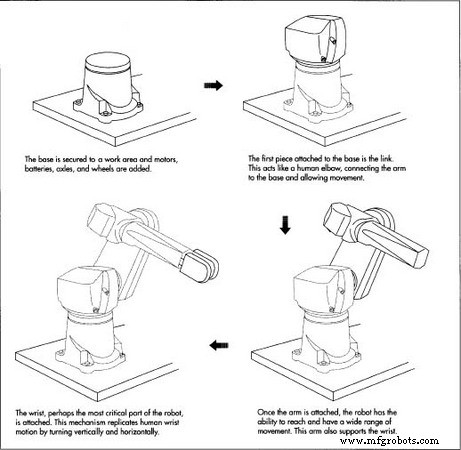
Untuk memulai proses perakitan, robot bergerak terlebih dahulu memasang motor traksi, baterai, gandar, roda, dan ban. Robot stasioner tidak memerlukan barang-barang ini. Mereka sementara dibaut ke lantai untuk stabilitas selama perakitan. Kolom dan lengan yang bergerak dirangkai kembali dengan motor penggeraknya masing-masing dan kemudian dipasang ke alasnya. Basis berisi ring gear yang digerakkan oleh motor untuk memberikan gerakan memutar. Itu harus berpasangan erat dengan roda gigi penggerak yang ada di kolom. Bantalan dorong menopang berat kolom dan lengan di alasnya. Skala magnetik mengelilingi bantalan dan memberikan umpan balik posisi elektronik ke pengontrol.
Tautan
- 3 Sambungan berikutnya adalah tautan. Ini bertindak seperti siku, dan menghubungkan lengan ke pangkalan. Dukungan stabilizer memberikan kontrol posisi ke tautan, memungkinkannya bergerak di jalur yang telah ditentukan. Komponen-komponen ini berisi dudukan bantalan tempat poros poros dibaut. Setiap bantalan dilumasi sebelumnya atau dilengkapi dengan saluran pelumasan atau fitting. Tautan berisi sensor posisi yang memberikan sinyal posisi lain ke pengontrol.
Lengan
- 4 Lengan dipasang ke bagian tegak dari tautan. Ini memberikan "jangkauan" paling banyak ke robot dan mendukung pergelangan tangan. Lengan berisi poros penggerak yang mengoperasikan pergelangan tangan. Tiga motor, atau kombinasi motor dan silinder hidrolik, adalah:
 Robot industri dapat memuat 2.000 bagian individu dan dirakit oleh tim. Tim-tim ini mulai dari pangkalan, dan merakit komponen ke dalam robot hingga selesai dan siap untuk pengujian dan penyelesaian. terhubung ke poros penggerak. Karena sambungan lengan dan sambungan harus menahan seluruh beban pergelangan tangan, hal ini dilakukan dengan bantalan besar dan pin pivot.
Robot industri dapat memuat 2.000 bagian individu dan dirakit oleh tim. Tim-tim ini mulai dari pangkalan, dan merakit komponen ke dalam robot hingga selesai dan siap untuk pengujian dan penyelesaian. terhubung ke poros penggerak. Karena sambungan lengan dan sambungan harus menahan seluruh beban pergelangan tangan, hal ini dilakukan dengan bantalan besar dan pin pivot.
Pergelangan Tangan
- 5 Pergelangan tangan adalah mekanisme penting dari robot. Pergelangan tangan yang paling meniru gerakan manusia dengan memutar dan memutar untuk menempatkan pistol cat, tukang las, atau alat lain pada posisi yang benar. Banyak robot juga memiliki perangkat elektronik penginderaan beban di pergelangan tangan untuk memberi sinyal saat ada penghalang, atau saat beban terlalu berat untuk diambil dengan aman. Sensor posisi tambahan dan elektronik kontrol alat juga dipasang ke lengan dan pergelangan tangan.
Pengkabelan ke pengontrol
- 6 Setelah perakitan mekanis selesai, pengkabelan dan pemipaan robot dapat diselesaikan. Semua dari
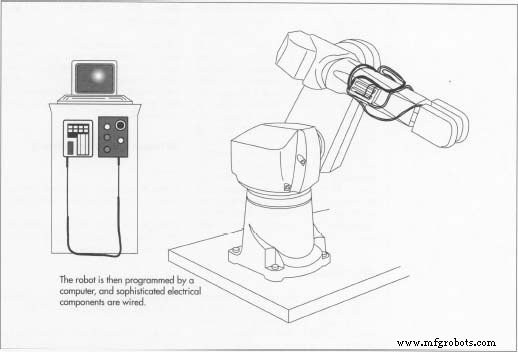 Sensor motor dan komponen listrik harus memiliki kabel untuk daya dan membawa informasi kembali ke komputer kontrol. Kadang-kadang, ruang yang tidak terpakai di lengan dan alas menyediakan tempat yang praktis untuk memasang beberapa elektronik pengontrol, memperpendek jalur kabel. Silinder hidrolik dan udara memiliki selang yang membawa tekanan untuk mengoperasikannya, dikendalikan dari katup di dasar. Sebagian besar kabel dan selang ini dirutekan kembali ke kabinet pengontrol yang, untuk robot bergerak, dipasang ke alasnya. Jika robot tidak bergerak, pengontrol ini biasanya dipasang beberapa meter jauhnya dan dihubungkan dengan tali pusar. Setelah perakitan, lengan dan kolom robot terkadang ditutup dengan pelindung dan pelindung untuk melindunginya dari semprotan cat, percikan las, atau bahaya lain di lingkungan.
Sensor motor dan komponen listrik harus memiliki kabel untuk daya dan membawa informasi kembali ke komputer kontrol. Kadang-kadang, ruang yang tidak terpakai di lengan dan alas menyediakan tempat yang praktis untuk memasang beberapa elektronik pengontrol, memperpendek jalur kabel. Silinder hidrolik dan udara memiliki selang yang membawa tekanan untuk mengoperasikannya, dikendalikan dari katup di dasar. Sebagian besar kabel dan selang ini dirutekan kembali ke kabinet pengontrol yang, untuk robot bergerak, dipasang ke alasnya. Jika robot tidak bergerak, pengontrol ini biasanya dipasang beberapa meter jauhnya dan dihubungkan dengan tali pusar. Setelah perakitan, lengan dan kolom robot terkadang ditutup dengan pelindung dan pelindung untuk melindunginya dari semprotan cat, percikan las, atau bahaya lain di lingkungan.
Instalasi
Instalasi terjadi di situs pengguna. Jika / stasioner, robot diamankan ke lantai dengan baut. Jika bergerak, kawat pemandu ditanam di lantai agar robot dapat mengikuti dari satu tugas ke tugas lainnya. Ini mengikuti kabel dengan sinyal radio dan juga menggunakan kabel untuk berkomunikasi dengan pengontrol pusat. Baru-baru ini, laser telah digunakan untuk menghilangkan kawat. Robot dipandu melalui jalurnya oleh sinar laser yang dipantulkan dari dinding. Beberapa desain juga menggabungkan kamera video. Aplikasi stasioner biasanya mengharuskan pagar dibangun di sekitar robot sehingga manusia yang tidak curiga tidak berkeliaran ke area kerja robot dan terluka. Setelah pemasangan, pabrikan robot biasanya memberikan pelatihan pengoperasian dan pemeliharaan kepada pelanggan.
Kontrol Kualitas
Pengujian terdiri dari dua bagian:akurasi fungsional dan proses yang dikenal sebagai "burn-in". Setelah robot yang dirakit diberi energi dengan daya, program komputer menginstruksikan pengontrol untuk menggerakkan lengan robot melalui serangkaian gerakan. Rekaman akurat dari gerakan ini dibuat, setiap masalah diperbaiki. Kemudian robot ditempatkan ke dalam operasi terus menerus selama beberapa jam. Ini disebut burn-in, dan memiliki dua fungsi. Pertama, kehilangan akurasi dapat dideteksi dengan menggunakan data dari uji fungsional. Contoh seperti itu akan menunjukkan masalah desain, perakitan longgar, bantalan rusak, atau sejenisnya. Kedua, uji coba membawa elektronik dan hidraulik ke suhu operasi. Ini penting karena pengontrol diprogram dengan faktor koreksi yang disebut offset. Offset ini mengkompensasi umpan balik dari sensor posisi untuk memungkinkan variasi suhu komponen. Dengan mesin dipanaskan, programmer dapat menempatkan faktor koreksi ke dalam program untuk memberikan kinerja yang optimal.
Masa Depan
Robotika adalah salah satu segmen pasar mesin industri yang tumbuh paling cepat. Didorong terutama oleh kemajuan teknologi komputer, robot yang lebih tua dengan cepat menjadi usang oleh model-model baru. Perusahaan Jepang memimpin pengembangan robotika, dan banyak dari desain mereka menggabungkan ilmu baru kecerdasan buatan yang memungkinkan robot untuk "belajar" dan "menyesuaikan" operasi mereka sendiri.
Kemajuan dalam kamera dan penglihatan elektronik juga akan berdampak pada robot pada 1990-an. Banyak robot akan memasuki area penggunaan baru seperti layanan medis dan makanan, yang akan membawa lebih banyak orang ke dalam kontak dengan mereka daripada sebelumnya terjadi di tempat kerja industri.



 biasanya berat, untuk mencegah robot terbalik. Itu dibuat dengan casting atau dengan pengelasan, kemudian mesin. Banyak produsen robot menggunakan robot untuk mengelas suku cadang baru.
biasanya berat, untuk mencegah robot terbalik. Itu dibuat dengan casting atau dengan pengelasan, kemudian mesin. Banyak produsen robot menggunakan robot untuk mengelas suku cadang baru.