

Sistem Kontrol Otomatisasi

Manufaktur industri
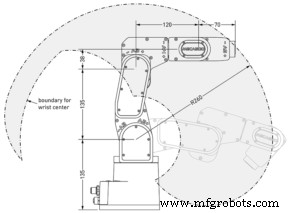 berbagai lokasi. Oleh karena itu, Anda pasti ingin mengetahui kumpulan lokasi yang dapat Anda jangkau dengan end-effector tertentu yang dipasang pada lengan robot enam sumbu tertentu. Anda mungkin akan meminta semacam diagram yang menunjukkan "area kerja", "volume kerja", "amplop kerja", atau "jangkauan kerja" robot. Dan, sayangnya, Anda akan sering melihat diagram sederhana seperti yang ditampilkan di sini, atau lebih buruk lagi, dengan apa yang disebut jangkauan robot.
berbagai lokasi. Oleh karena itu, Anda pasti ingin mengetahui kumpulan lokasi yang dapat Anda jangkau dengan end-effector tertentu yang dipasang pada lengan robot enam sumbu tertentu. Anda mungkin akan meminta semacam diagram yang menunjukkan "area kerja", "volume kerja", "amplop kerja", atau "jangkauan kerja" robot. Dan, sayangnya, Anda akan sering melihat diagram sederhana seperti yang ditampilkan di sini, atau lebih buruk lagi, dengan apa yang disebut jangkauan robot.Tentu saja, ada beberapa pengecualian di bidang robotika, dalam hal representasi grafis. Ruang kerja robot Cartesian enam sumbu seperti yang ditunjukkan di bawah ini mudah untuk dideskripsikan tetapi hanya untuk satu pilihan tooltip tertentu. Memang, jika tooltip dari end-effector robot bertepatan dengan titik persimpangan sumbu dari tiga sambungan putar, maka robot enam sumbu otomasi mikro ini dapat memposisikan tooltipnya di mana saja di dalam kubus kuning, dengan orientasi alat apa pun.
Sayangnya, sebagian besar robot industri enam sumbu bukan Cartesian, karena berbagai alasan praktis. Misalnya, robot Cartesian di atas memiliki ruang kerja yang sangat kecil dalam hal penentuan posisi. Lengan robot enam sumbu yang khas, sering kali secara aneh disebut sebagai robot yang diartikulasikan secara vertikal , terdiri dari tujuh tautan (badan), dihubungkan secara seri melalui enam sambungan putar yang digerakkan. Badan pertama adalah alas robot, dan yang terakhir adalah flange robot (juga disebut antarmuka mekanis ). Juga, sumbu sambungan pertama adalah vertikal, sumbu sambungan 2 dan 3 adalah horizontal, sumbu sambungan 4 normal terhadap sumbu sambungan 3, dan sumbu dari tiga sambungan terakhir biasanya berpotongan pada satu titik.
Sementara lengan robot industri umumnya dijual tanpa perkakas apa pun, efektor akhir (seperti gripper atau probe sentuh) akhirnya dipasang ke flensa robot. Pengguna kemudian harus mengaitkan kerangka referensi alat , diperbaiki untuk efektor akhir ini. Kerangka referensi pahat ini ditentukan sehubungan dengan bingkai referensi flensa . Asal kerangka referensi alat disebut TCP (titik pusat alat ). Oleh karena itu, pada akhirnya, Anda pasti tertarik dengan serangkaian pose sehubungan dengan kerangka referensi dasar robot , dimana robot dapat membawa kerangka referensi alat tertentu. Dengan demikian, ruang kerja robot adalah serangkaian pose yang dapat dicapai oleh kerangka referensi alat robot.
Dalam lengan robot enam sumbu mikro-otomatisasi tipikal, seperti Meca500 kami, apa pun end-effector-nya, untuk setiap posisi yang memungkinkan dari TCP, kisaran orientasi pahat yang dapat dicapai benar-benar berbeda, karena gangguan mekanis, batas sambungan, dan batasan panjang sambungan. Di atas penggabungan tinggi antara kemampuan pemosisian dan orientasi dari lengan robot enam sumbu biasa, robot ini memiliki apa yang disebut singularitas . Dalam singularitas, robot tidak dapat bergerak ke arah tertentu. Ini adalah penyumbatan fisik, bukan semacam masalah matematika, dan benar-benar semua lengan robot mikro-otomatisasi enam sumbu (termasuk yang Cartesian yang ditunjukkan di atas) memiliki singularitas. Misalnya, ketika semua sambungan di Meca500 berada pada derajat nol, seperti pada gambar kiri di bawah, end-effector robot tidak dapat bergerak sepanjang garis sejajar dengan alas y -sumbu (yang hijau). Untuk bergerak di sepanjang garis ini, sambungan 4 dan 6 harus berputar ±90° terlebih dahulu (berlawanan arah).
Singularitas adalah fenomena yang sangat penting (atau lebih tepatnya gangguan) dalam robotika dan akan dibahas dalam tutorial terpisah. Di sini, cukup dikatakan bahwa meskipun jalur berada di dalam ruang kerja robot, seperti pada contoh di atas, kerangka acuan alat robot mungkin tidak dapat mengikutinya terus menerus (yaitu, tanpa jeda dalam gerakan TCP) , karena singularitas.
Dengan demikian, singularitas robot semakin membatasi bagian ruang kerja robot yang dapat digunakan. Faktanya, ruang kerja lengan robot enam sumbu otomasi mikro tipikal adalah kombinasi dari beberapa himpunan bagian ruang kerja bebas singularitas, yang dipisahkan oleh singularitas. Robot dapat bergerak ke mana saja dalam total ruang kerja, dalam mode gabungan, tetapi hanya di salah satu subset ruang kerja bebas singularitas saat dalam mode Cartesian (yaitu, saat TCP-nya terus mengikuti jalur tertentu).
Masing-masing subset ruang kerja bebas singularitas ini sesuai dengan konfigurasi robot tertentu. Topik ini akan dibahas dalam tutorial mendatang tentang singularitas robot. Untuk saat ini, perhatikan bahwa jika pose tertentu tampaknya tidak dapat diakses dengan konfigurasi robot saat ini, mungkin dapat diakses dengan konfigurasi lain. Misalnya, pose kerangka referensi pahat pada gambar di bawah ini hanya dapat dicapai di salah satu dari delapan konfigurasi robot. Namun, kesalahan umum adalah mempertimbangkan hanya satu dari subset ruang kerja bebas singularitas alih-alih total ruang kerja (yaitu, hanya bekerja di salah satu dari delapan mode konfigurasi). Perhatikan bahwa jika Anda menentukan pose menggunakan x , y , z koordinat dan sudut Euler lalu gunakan perintah MovePose, robot akan secara otomatis mencari konfigurasi terbaik. Sayangnya, bagaimanapun, pengguna biasanya mengajarkan posisi robot dengan jogging, bukan dengan menentukan pose.
Seringkali, pengguna sudah memiliki satu set pose end-effector untuk mencapai aplikasi yang mereka berikan. Misalnya, benda kerja harus diambil dari konveyor, kemudian dipresentasikan di depan kamera dengan berbagai orientasi, dan terakhir diendapkan di konveyor lain. Menemukan penempatan kamera yang optimal, pemasangan gripper yang optimal, dan desain jari yang optimal, jauh dari kata sepele. Sayangnya, hingga saat ini, tidak ada prosedur otomatis yang tersedia secara komersial untuk menemukan desain sel yang optimal — satu-satunya metode adalah dengan coba-coba.
Untungnya, Anda tidak perlu memiliki penyiapan nyata untuk ini; Anda dapat menggunakan perangkat lunak simulasi seperti RoboDK. Meskipun demikian, Anda masih memerlukan beberapa keterampilan robotika, atau Anda mungkin menghabiskan banyak upaya untuk coba-coba. Jadi, berikut ini, kami akan memberi Anda sepuluh panduan untuk memanfaatkan ruang kerja robot Anda sebaik-baiknya. Meskipun, kami menggunakan Meca500 sebagai contoh, panduan ini berlaku untuk lengan robot enam sumbu otomatisasi mikro apa pun.
Panduan 1: Tempatkan TCP Anda sedekat mungkin dengan flensa robot
Dalam inspeksi, biasanya Anda harus mempresentasikan bagian di depan kamera dengan berbagai orientasi. Dalam aplikasi seperti itu, aturan praktis pertama adalah menempatkan kerangka acuan pahat sedekat mungkin dengan kerangka acuan flensa. Dengan kata lain, Anda harus merancang sistem pencengkeram yang memungkinkan Anda mencengkeram bagian yang akan diperiksa sedekat mungkin dengan flensa robot.
Perhatikan bahwa kami menyediakan pegangan elektrik opsional dengan pelat adaptor yang memungkinkan Anda memasang gripper seperti yang ditunjukkan di atas. Namun, untuk beberapa aplikasi, mungkin lebih baik merancang pelat adaptor Anda sendiri untuk memasang gripper sedemikian rupa sehingga jari-jari dan sumbu sambungan 6 berada dalam satu bidang, atau memasang gripper di sepanjang sumbu sambungan 6 ( seperti di video ini). Alternatif lain mungkin menggunakan jari berbentuk L.
Pedoman 2: Jangan bergerak dalam mode Cartesian kecuali mengikuti jalur
Dalam pemeriksaan, Anda sering perlu memutar bagian dalam orientasi yang berbeda. Tentu saja, dalam kasus ini, lebih mudah menggunakan perintah MoveLinRelTRF atau menjalankan robot dalam mode Cartesian. Namun, kedua pendekatan tersebut gagal jika terdapat singularitas di sepanjang rotasi, seperti pada contoh yang diilustrasikan pada gambar di bawah ini. Dalam contoh tersebut, Anda tidak dapat merotasi end-effector di sekitar y-nya -axis (yang hijau) pada 90°, karena singularitas (sumbu sambungan 4 dan 6 menjadi sejajar).
Jadi, Anda harus mempelajari cara menggunakan sudut Euler dan menggunakan perintah MovePose. Atau, Anda dapat menggunakan RoboDK. Karena RoboDK adalah simulator, ini memungkinkan Anda melewati singularitas dalam mode joging Cartesian. Terlepas dari singularitas, selalu gunakan perintah MovePose atau MoveJoints kecuali jika Anda ingin TCP Anda mengikuti jalur tertentu. Penggunaan perintah ini umumnya menghasilkan waktu siklus tercepat.
Pedoman 3: Jika pemasangan kabel menahan sambungan 6 terlalu banyak, sejajarkan sumbu sambungan 1, 4 dan 6
Meskipun sambungan 6 secara mekanis tidak terbatas, jika Anda menggunakan end-effector yang memiliki kabel terpasang, seperti gripper kami, kisaran sambungan 6 akan dibatasi sekitar ±180° atau bahkan kurang. Jika Anda membutuhkan lebih banyak jangkauan, Anda dapat menyelaraskan sumbu sambungan 4 dan 6, atau bahkan sambungan 1, 4 dan 6. Tentu saja, konfigurasi seperti itu akan tunggal, jadi Anda perlu menggunakan perintah MoveJoints untuk memutarnya sumbu bertepatan
Pedoman 4: Jika Anda menggunakan end-effector dengan kabel, pertahankan sambungan 6 sedekat mungkin dengan nol derajat
Jika memungkinkan, pada posisi yang diinginkan, usahakan untuk menjaga sambungan 6 sedekat mungkin dengan nol derajat. Jika, misalnya, Anda mengambil benda kerja dalam posisi robot dengan sambungan 6 berada pada 170°, lalu menjalankan perintah MovePose, sambungan 6 kemungkinan besar akan banyak berputar. Misalnya, jika pada pose baru yang diinginkan, sambungan 6 bisa berada pada 190°, robot akan secara otomatis memutar sambungan terakhirnya 340° ke arah negatif (bukan 20° ke arah positif).
Pedoman 5: Jika Anda perlu banyak mengorientasikan, posisikan TCP Anda pada sumbu sambungan 1
Jika Anda perlu mencakup rentang orientasi yang luas, maka Anda harus memposisikan TCP Anda pada sumbu sambungan 1. Konfigurasi seperti itu akan memungkinkan Anda memutar ±175° di sekitar sumbu sambungan 1 dan ±180° di sekitar sumbu sambungan 6. Semakin jauh pusat pergelangan tangan robot dari sambungan 1, semakin sedikit kemampuan orientasi robot.
Pedoman 6: Coba semua konfigurasi robot
Terkadang, robot akan terlalu dekat dengan singularitas dalam satu atau lebih pose end-effector yang ingin dicapai. Dalam aplikasi inspeksi, itu mungkin tidak menjadi masalah, tetapi jika Anda perlu memilih atau menempatkan objek, kemungkinan besar Anda perlu datang dan pergi dari pose terakhir dalam mode linier. Dalam kasus seperti itu, uji semua kemungkinan konfigurasi robot dan pilih salah satu yang terjauh dari singularitas. Misalnya, pada gambar di bawah, konfigurasi kiri terlalu dekat dengan singularitas (sumbu 4 dan 6 hampir sejajar), tetapi konfigurasi kanan cukup jauh dari singularitas.
Pedoman 7: Pertimbangkan lebih dari sekadar pencapaian
Seperti yang telah kami sebutkan, ruang kerja lengan robot enam sumbu otomasi mikro adalah kumpulan dari beberapa himpunan bagian ruang kerja yang dipisahkan oleh singularitas. Selain itu, tidak semua pose yang dapat dicapai sama-sama "baik". Memang, ruang kerja lengan robot enam sumbu sangat heterogen, dalam hal kriteria kinerja seperti kecepatan dan presisi. Kami telah menyebutkan bahwa Anda harus berada sejauh mungkin dari singularitas, saat bergerak dalam mode Cartesian. Selain itu, semakin direntangkan lengan robot, semakin sedikit presisinya (semakin fleksibel) dan semakin banyak waktu yang diperlukan untuk menekan getaran pada tooltip.
Pedoman 8: Manfaatkan redundansi robot jika Anda tidak memerlukan enam derajat kebebasan
Dalam banyak kasus, Anda hanya memerlukan lima derajat kebebasan. Misalnya, jika end-effector Anda adalah dispenser perekat atau spindel, Anda mungkin tidak peduli untuk mengarahkannya masing-masing pada sumbu jarum atau poros. Selain itu, jika Anda memeriksa benda kerja menggunakan sensor sumbu simetris seperti kamera, dalam banyak kasus Anda mungkin dapat mempresentasikan benda kerja dalam rotasi apa pun di sekitar sumbu sensor. Dalam kasus ini, jangan sejajarkan sumbu sambungan 6 dengan sumbu simetri alat atau sensor Anda dan pilih yang terbaik dari sekian banyak posisi robot untuk setiap pose yang akan dicapai. Terbaik berarti jauh dari singularitas, tetapi juga paling dekat dengan pose sebelumnya dan selanjutnya untuk dicapai.
Pedoman 9: Perbaiki robot Anda dalam posisi tegak, kecuali benar-benar diperlukan
Seperti kebanyakan robot industri, Meca500 dapat dipasang dalam orientasi apa pun (misalnya, terbalik, atau di dinding). Satu-satunya masalah dengan lampiran yang tidak tegak adalah Anda memerlukan perlengkapan yang sangat kokoh, yang mungkin membuat sel Anda lebih rumit dan mahal. Oleh karena itu, pilih attachment yang tidak tegak hanya setelah mencoba memperbaiki robot secara tegak lurus.
Pedoman 10: Ukur tujuh kali, potong sekali
Pepatah bahasa Inggris berbunyi "Ukur dua kali, potong sekali", tetapi untuk desain sel robot, pilih versi Rusia "Ukur tujuh kali, potong sekali". Jika sel Anda relatif kompleks, atau ruang kerja robot Anda tampaknya dibatasi, Anda harus menggunakan paket simulasi robot dan melalui banyak iterasi desain hingga Anda menemukan solusi yang memuaskan. Namun, jangan hanya mengandalkan simulasi. Paket simulasi umum seperti RoboDK tidak menyimulasikan perilaku robot yang sebenarnya. Misalnya, gerakan linier tertentu mungkin dapat dilakukan di RoboDK, tetapi tidak mungkin dilakukan pada robot sungguhan, karena singularitas. Oleh karena itu, Anda juga harus mencoba program Anda pada robot yang sebenarnya.
Kesimpulannya, kecuali jika aplikasi Anda hanya melibatkan beberapa gerakan berulang, Anda harus benar-benar memahami ruang kerja robot Anda dan menghabiskan banyak waktu untuk merancang sel robot Anda. Desain sel robot tidak hanya mampu melakukan semua gerakan robot, tetapi juga tentang mengoptimalkan waktu siklus dan kriteria performa lainnya (presisi, konsumsi energi).
Sistem Kontrol Otomatisasi
Dengan lebih dari 120 tahun bisnis, KUKA (Keller und Knappich Augsburg) telah merayakan umur panjang dan inovasi selama lebih dari satu abad. KUKA telah mendorong kemajuan teknologi sejak dimulainya pada tahun 1898, ketika mereka memulai sebagai bisnis yang menjual penerangan yang terjangkau untuk r
Kinematika robot adalah cabang mekanika yang berkonsentrasi pada gerak benda tanpa mengacu pada gaya yang menyebabkan gerakan. Kinematika robot melibatkan penerapan geometri ke berbagai derajat kebebasan dalam rantai kinematik yang membentuk struktur sistem robot. Kinematika robot adalah kuncinya ka
Jangan biarkan kata-kata Robot Refurbished membuat Anda takut! Lihat bagaimana Anda dapat menghemat lebih banyak uang tanpa mengorbankan kualitas. Jika Anda berpikir untuk mengotomatiskan proses di lini manufaktur Anda, tetapi Anda tidak yakin apakah Anda mampu membayar biaya awal robot baru, kami
Salah satu pertanyaan paling umum yang kami dapatkan dari pelanggan adalah untuk apa baterai di robot dan pengontrol saya digunakan dan seberapa sering saya harus menggantinya? ini biasanya mengarah ke bagaimana cara mengubahnya? Baterai di robot dan pengontrol keduanya digunakan untuk mempertahanka