

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
 |
|
 |
|
Bukankah lebih bagus jika kita bisa membuat robot berkaki dua dengan beberapa servos? Inner Geek berpikir begitu dan inilah hasilnya…
Itu Walbi, WALink BIped, robot yang kami buat untuk proyek pembelajaran mesin yang tidak pernah berhasil (Walbi juga tidak, tapi itu karena kedua kakinya tertanam kuat di tanah).
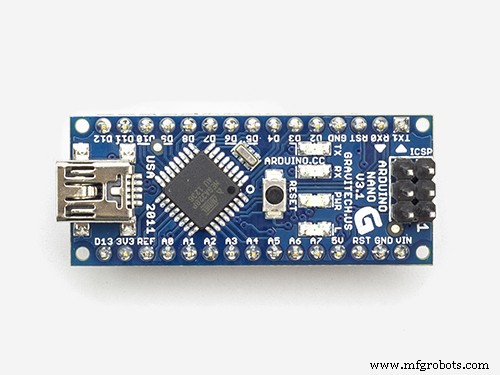
Walbi menggunakan Arduino Nano untuk "otak", servo LX-16A untuk "otot" dan komponen cetak 3D plastik untuk "tulang". Servo LewanSoul LX-16A adalah servo impian untuk proyek robot kecil (ish), karena ringan, dapat bergerak lebih dari 19 kg.cm dan terhubung dengan satu kabel, berjalan dari servo-ke-servo, membuat pemasangan kabel robot anak bermain.
Walbi adalah humanoid skala 2:1 dan kakinya setinggi 55 cm (21,7 inci) dari tumit hingga pinggang dan beratnya 1, 1 Kg (2,4 lbs). Bagian putih tubuhnya dicetak 3D, tetapi bisa dengan mudah dibuat dari kayu kokoh yang ringan.
Pemrograman Walbi sangat sederhana. Anda dapat mengunduh di bawah dua program yang diperlukan untuk melakukan penangkapan gerak dan pemutaran, dan dengan itu Anda dapat membuat Walbi berjalan, merangkak, memanjat, melompat, atau menari! Anda hanya perlu menggerakkan kakinya ke pose yang diinginkan, merekam pose itu, membentuk Walbi menjadi pose lain, merekamnya, dan seterusnya, lalu, ketika Anda telah merekam urutan lengkapnya, Anda dapat duduk dan menontonnya tampil dengan terampil. gerakan yang Anda ajarkan.
Mungkin kamu bisa mengajarimu tarian sungai
Membangun Walbi
Walbi dicetak 3D dalam plastik PLA, menggunakan printer FlashForge Creator Pro. Anda dapat mengunduh file STL dari Thingiverse, atau menggunakan metode alternatif untuk membuat kaki, "tulang" kaki, dan pinggang, menggunakan kayu atau logam. Dukungan servo menempel pada bagian-bagian ini, ke servos dan satu sama lain.
Anda memerlukan penyangga logam dari empat jenis berbeda yang tersedia untuk memasang servos ke bagian yang dicetak dan satu sama lain (informasi dan foto lebih lanjut tersedia di blog Release The Inner Gook).
Pengkabelan
Untuk mengontrol servo LX-16A, Anda memerlukan Papan Debug LewanSoul.
Ini akan menerima perintah dari port serial pada Arduino Nano. Karena kami menggunakan serial perangkat keras Arduino untuk berkomunikasi dengan komputer, kami telah menggunakan perpustakaan SoftwareSerial untuk membuat port serial kedua di Nano, untuk terhubung ke Papan Debug.
Pengkabelan diminimalkan dengan servos serial. Ada kabel dari setiap servo ke servo berikutnya (kabel serial disediakan dengan servos) dan servos di colokan pinggang langsung ke Papan Debug. Komputer Anda terhubung ke port USB Arduino dan Arduino terhubung ke Debug Board menggunakan tiga kabel jumper (TX, RX dan GND) yang terhubung ke pin Arduino yang Anda konfigurasikan untuk SoftwareSerial – kami menggunakan pin 10 dan 1 dalam kode1 .
Servo menggunakan baud rate 115200 (jika Anda tahu cara mengubahnya, beri tahu kami, karena ini terlalu tinggi). Baud rate ini tinggi untuk SoftwareSerial, jadi kami harus menerapkan fungsi pemeriksaan kesalahan dan uji coba ulang. Dalam beberapa kasus, ketekunan diperlukan untuk mendapatkan pembacaan yang benar.
Kekuatan
Servo dapat memberikan 19,5kg.cm pada 7.4v. Kami menggunakan 6v dan arus stasioner di bawah tiga amp.
Pemrograman
Anda bisa mendapatkan kode Arduino di repositori Github proyek.
Dua program digunakan untuk menangkap gerakan dan memutar ulang, teknik yang mirip dengan yang digunakan dalam film. Anda mulai dengan membentuk robot menjadi pose. Karena servos default ke motor mati, Anda dapat memutar servos dengan tangan. Setelah Anda memiliki robot dalam pose yang diinginkan, Anda menggunakan program Walbi_record untuk membaca dan menampilkan semua sudut servo. Anda kemudian memasukkan pembacaan sudut tersebut ke dalam variabel poseAngles di Walbi_play, dan menggunakan program untuk memutar ulang urutan pose yang direkam, dengan kecepatan yang disetel menggunakan variabel timeToMove (dalam mili-detik).
Kami harap Anda menikmati proyek ini. Jangan ragu untuk membagikan cinta Anda dengan meninggalkan komentar, berlangganan blog, atau jenis tindakan umpan balik lainnya. Kami menghargainya!
Nugget Geek Dalam
Berikut adalah beberapa tips dan trik yang dipelajari saat membuat Walbi:
Proses manufaktur
Komponen dan persediaan Arduino UNO × 1 Adafruit PWM Servo Driver Shield × 1 baut M3 × 8 Pencuci M3 × 8 LM2596 Konverter tegangan turun DC-DC × 1 PLA Merah × 1 PLA Putih × 1 Protractor matematika yang jelas 180 derajat × 1
Pusat Keunggulan Teknologi Komposit Kordsa di Istanbul, Turki. Sumber | Kordsa Anda akan dimaafkan jika, sampai beberapa tahun yang lalu, Anda belum pernah mendengar nama Kordsa (Istanbul, Turki). Meskipun perusahaan memiliki sejarah panjang dalam memasok produk kabel ke pasar ban global, baru sa
Subyek reshoring manufaktur telah menjadi titik perdebatan di seluruh Industri Inggris sejak produksi rekayasa telah disubkontrakkan ke perusahaan lepas pantai. Sejauh ini, sektor manufaktur telah bertahan dan Inggris adalah negara manufaktur terbesar ke-9 di planet ini. Tetapi munculnya virus COVID
Manufaktur adalah sesuatu yang dunia kita andalkan. Pada 2018, industri manufaktur menyumbang hampir 16% dari PDB global. Sayangnya, industri manufaktur terpukul selama pandemi COVID-19 – nama yang diberikan untuk virus yang disebabkan oleh SARS-CoV-2. Banyak pabrik harus ditutup dan mulai dibuka ke