

Teknologi Industri

Manufaktur industri
Induktor tidak berperilaku dengan cara yang sama seperti resistor. Sedangkan resistor hanya menentang aliran arus melalui mereka (dengan menjatuhkan tegangan berbanding lurus dengan arus), induktor menentang perubahan dalam arus yang melaluinya, dengan menjatuhkan tegangan yang berbanding lurus dengan laju perubahan arus.
Sesuai dengan Hukum Lenz , tegangan induksi ini selalu memiliki polaritas sedemikian rupa untuk mencoba mempertahankan arus pada nilai sekarang. Artinya, jika arus bertambah besar, tegangan induksi akan "mendorong" aliran arus; jika arus berkurang, polaritasnya akan berbalik dan “mendorong” arus untuk melawan penurunan.
Penentangan terhadap perubahan saat ini disebut reaktansi , daripada resistensi. Dinyatakan secara matematis, hubungan antara tegangan jatuh pada induktor dan laju perubahan arus melalui induktor adalah sebagai berikut:

Ekspresi di/dt adalah salah satu dari kalkulus, yang berarti laju perubahan arus sesaat (i) dari waktu ke waktu, dalam ampere per detik.
Induktansi (L) dalam Henrys, dan tegangan sesaat (e), tentu saja, dalam volt. Terkadang Anda akan menemukan laju tegangan sesaat yang dinyatakan sebagai “v” dan bukan “e” (v =L di/dt), tetapi artinya sama persis.
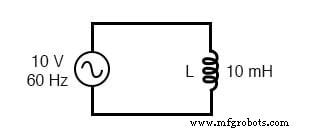
Untuk menunjukkan apa yang terjadi dengan arus bolak-balik, mari kita analisis rangkaian induktor sederhana:
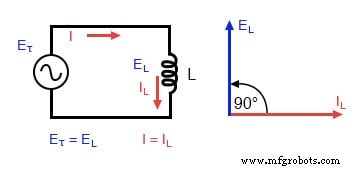
Sirkuit induktif murni:Arus induktor tertinggal dari tegangan induktor sebesar 90°.
Jika kita memplot arus dan tegangan untuk rangkaian yang sangat sederhana ini, akan terlihat seperti ini:
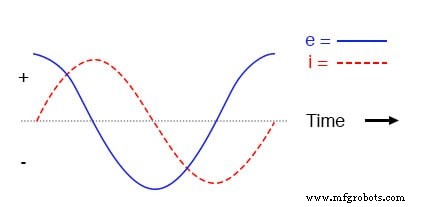
Sirkuit induktif murni, bentuk gelombang.
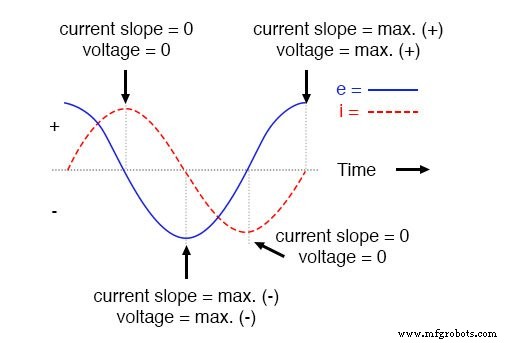
Ingat, tegangan yang dijatuhkan pada induktor adalah reaksi terhadap perubahan dalam arus yang melaluinya.
Oleh karena itu, tegangan sesaat adalah nol setiap kali arus sesaat berada pada puncaknya (perubahan nol, atau kemiringan level, pada gelombang sinus saat ini), dan tegangan sesaat berada pada puncak di mana pun arus sesaat berada pada perubahan maksimum (titik kemiringan paling curam pada gelombang saat ini, di mana ia melintasi garis nol).
Hal ini menghasilkan gelombang tegangan yang 90° keluar fase dengan gelombang arus. Melihat grafik, gelombang tegangan tampaknya memiliki "awal" pada gelombang arus; tegangan "mengarahkan" arus dan arus "mengikuti" tegangan.
Arus tertinggal dari tegangan sebesar 90° dalam rangkaian induktif murni.
Hal-hal menjadi lebih menarik ketika kita merencanakan kekuatan untuk sirkuit ini:
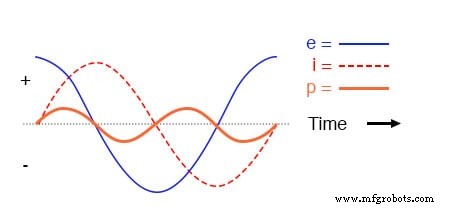
Dalam rangkaian induktif murni, daya sesaat mungkin positif atau negatif.
Karena daya sesaat adalah produk dari tegangan sesaat dan arus sesaat (p=ie), daya sama dengan nol setiap kali arus sesaat atau tegangan adalah nol. Kapan pun arus dan tegangan sesaat keduanya positif (di atas saluran), dayanya positif.
Seperti contoh resistor, daya juga positif ketika arus dan tegangan sesaat keduanya negatif (di bawah garis).
Namun, karena gelombang arus dan tegangan tidak sefase 90°, ada kalanya yang satu positif sementara yang lain negatif, yang mengakibatkan terjadinya daya sesaat negatif yang sama seringnya. .
Tapi apa yang negatif kekuatan maksudnya? Artinya induktor melepaskan daya kembali ke rangkaian, sedangkan daya positif berarti menyerap daya dari rangkaian.
Karena siklus daya positif dan negatif memiliki besaran dan durasi yang sama dari waktu ke waktu, induktor melepaskan daya yang sama banyaknya kembali ke sirkuit seperti yang diserap selama rentang satu siklus lengkap.
Apa artinya ini dalam arti praktis adalah bahwa reaktansi induktor menghilangkan energi bersih nol, sangat berbeda dengan resistansi resistor, yang menghilangkan energi dalam bentuk panas. Ingat, ini hanya untuk induktor yang sempurna, yang tidak memiliki hambatan kabel.
Oposisi induktor terhadap perubahan arus diterjemahkan menjadi oposisi terhadap arus bolak-balik secara umum, yang menurut definisi selalu berubah dalam besaran dan arah sesaat.
Oposisi terhadap arus bolak-balik ini mirip dengan resistansi tetapi berbeda karena selalu menghasilkan pergeseran fasa antara arus dan tegangan, dan ia menghilangkan daya nol. Karena perbedaannya, ia memiliki nama yang berbeda:reaktansi . Reaktansi terhadap AC dinyatakan dalam ohm, seperti halnya resistansi, kecuali bahwa simbol matematikanya adalah X, bukan R.
Untuk lebih spesifiknya, reaktansi yang terkait dengan induktor biasanya dilambangkan dengan huruf kapital X dengan huruf L sebagai subscript, seperti ini:XL .
Karena induktor menurunkan tegangan secara proporsional dengan laju perubahan arus, mereka akan menjatuhkan lebih banyak tegangan untuk arus yang berubah lebih cepat, dan lebih sedikit tegangan untuk arus yang berubah lebih lambat. Artinya, reaktansi dalam ohm untuk setiap induktor berbanding lurus dengan frekuensi arus bolak-balik. Rumus yang tepat untuk menentukan reaktansi adalah sebagai berikut:
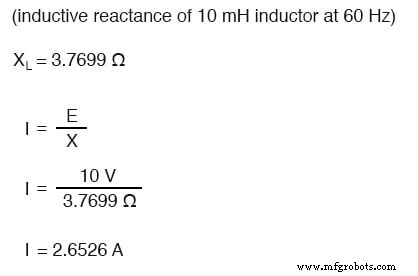
Jika kita mengekspos induktor 10 mH ke frekuensi 60, 120, dan 2500 Hz, itu akan menunjukkan reaktansi pada tabel di bawah ini.
Dalam persamaan reaktansi, istilah "2πf" (segala sesuatu di ruas kanan kecuali L) memiliki arti khusus tersendiri. Ini adalah jumlah radian per detik di mana arus bolak-balik "berputar", jika Anda membayangkan satu siklus AC untuk mewakili satu putaran penuh.
radian adalah satuan ukuran sudut:ada 2π radian dalam satu lingkaran penuh, seperti halnya ada 360° dalam satu lingkaran penuh. Jika alternator yang menghasilkan AC adalah unit kutub ganda, maka akan menghasilkan satu siklus untuk setiap putaran penuh putaran poros, yaitu setiap 2π radian, atau 360°.
Jika konstanta 2π ini dikalikan dengan frekuensi dalam Hertz (siklus per detik), hasilnya akan menjadi angka dalam radian per detik, yang dikenal sebagai kecepatan sudut sistem AC.
Kecepatan sudut dapat diwakili oleh ekspresi 2πf, atau mungkin diwakili oleh simbolnya sendiri, huruf kecil Yunani omega, yang tampak mirip dengan huruf kecil Romawi kita "w":. Jadi, rumus reaktansi XL =2πfL juga dapat ditulis sebagai XL =L.
Harus dipahami bahwa "kecepatan sudut" ini adalah ekspresi dari seberapa cepat siklus bentuk gelombang AC, siklus penuh sama dengan 2π radian. Ini belum tentu mewakili kecepatan poros aktual dari alternator yang menghasilkan AC.
Jika alternator memiliki lebih dari dua kutub, kecepatan sudut akan menjadi kelipatan dari kecepatan poros. Karena alasan ini, terkadang dinyatakan dalam satuan listrik radian per detik daripada radian (biasa) per detik, untuk membedakannya dari gerakan mekanis.
Bagaimanapun cara kita menyatakan kecepatan sudut sistem, jelaslah bahwa kecepatan itu berbanding lurus dengan reaktansi dalam sebuah induktor. Sebagai frekuensi (atau kecepatan poros alternator) meningkat dalam sistem AC, sebuah induktor akan menawarkan oposisi yang lebih besar untuk lewatnya arus, dan sebaliknya.
Arus bolak-balik dalam rangkaian induktif sederhana sama dengan tegangan (dalam volt) dibagi dengan reaktansi induktif (dalam ohm), seperti halnya arus bolak-balik atau searah dalam rangkaian resistif sederhana sama dengan tegangan (dalam volt) dibagi dengan hambatan (dalam ohm). Contoh rangkaian ditampilkan di sini:
Reaktansi induktif
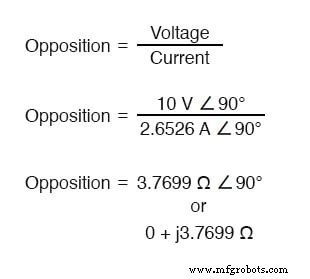
Namun, perlu diingat bahwa tegangan dan arus tidak sefasa di sini. Seperti yang ditunjukkan sebelumnya, tegangan memiliki pergeseran fasa +90° terhadap arus. Jika kita menyatakan sudut fase tegangan dan arus ini secara matematis dalam bentuk bilangan kompleks, kita menemukan bahwa oposisi induktor terhadap arus memiliki sudut fase juga:
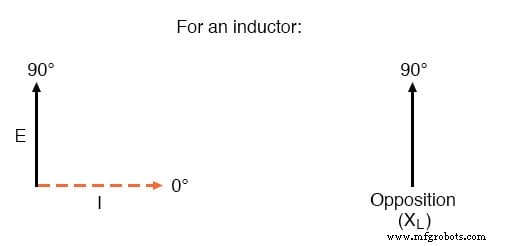
Arus tertinggal dari tegangan sebesar 90° dalam sebuah induktor.
Secara matematis, kita katakan bahwa sudut fasa dari oposisi induktor terhadap arus adalah 90°, yang berarti bahwa oposisi induktor terhadap arus adalah besaran imajiner positif. Sudut fase oposisi reaktif terhadap arus menjadi sangat penting dalam analisis rangkaian, terutama untuk rangkaian AC kompleks di mana reaktansi dan resistansi berinteraksi.
Akan terbukti bermanfaat untuk mewakili apa saja oposisi komponen terhadap arus dalam hal bilangan kompleks daripada jumlah skalar resistansi dan reaktansi.
TINJAUAN:
LEMBAR KERJA TERKAIT:
Teknologi Industri
Pada bagian terakhir, kita telah mempelajari apa yang akan terjadi pada rangkaian AC sederhana yang hanya terdiri dari resistor dan kapasitor. Sekarang kita akan menggabungkan dua komponen bersama-sama dalam bentuk seri dan menyelidiki efeknya. Rangkaian kapasitor seri:tegangan tertinggal dari a
Kabel Paralel dengan Panjang Tak Terbatas Namun, seandainya kita memiliki satu set kabel paralel tak berhingga panjang, tanpa lampu di ujungnya. Apa yang akan terjadi ketika kita menutup saklar? Karena tidak ada lagi beban di ujung kabel, sirkuit ini terbuka. Apakah tidak akan ada arus sama sekali?
Teorema Millman untuk Sirkuit AC &DC – Contoh Penyelesaian Langkah demi Langkah Teorema Millman Teorema Millman digunakan dalam analisis rangkaian ketika hanya memiliki cabang secara paralel. Oleh karena itu, teorema ini berguna untuk menghitung tegangan pada akhir suatu rangkaian. Teorema Millma
Pengatur arus bekerja setiap kali ponsel diisi ulang, mobil dinyalakan, komputer dicolokkan, atau peralatan listrik kecil dinyalakan. Kadang-kadang disebut pengatur tegangan, pengatur arus mengurangi dan membatasi jumlah listrik ke tingkat yang diperlukan agar perangkat listrik dapat beroperasi. Aru