

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
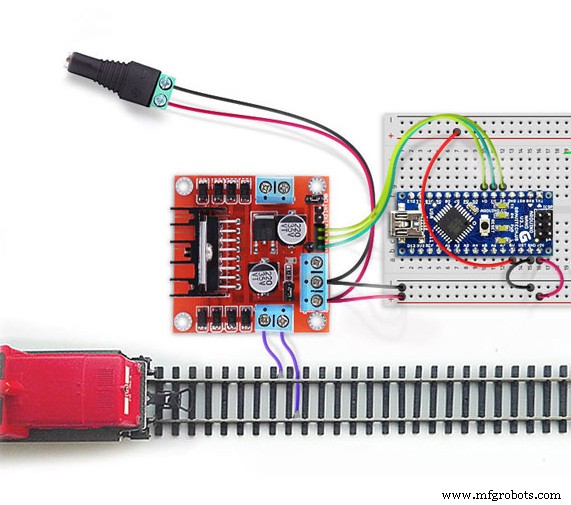
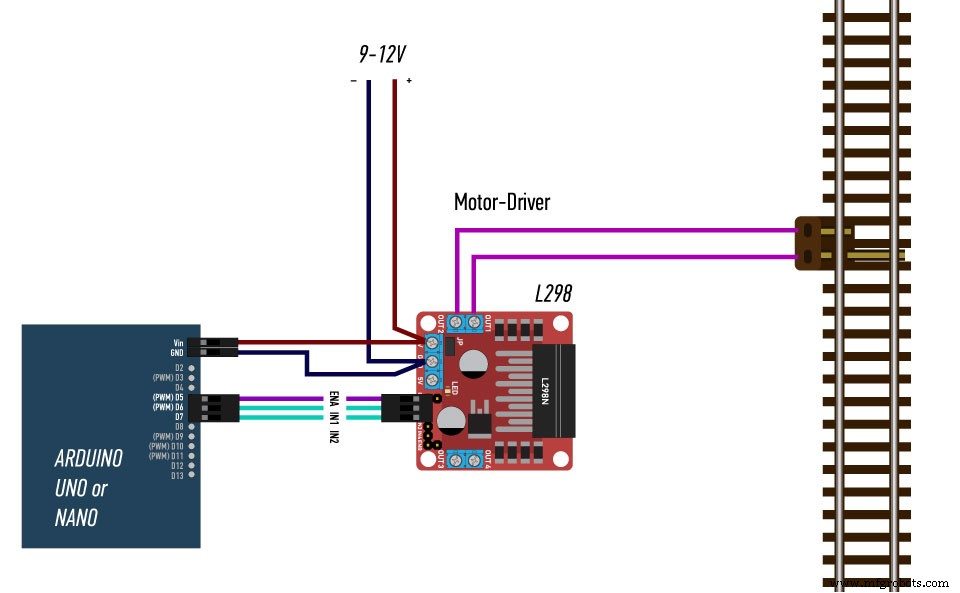
Skema yang sangat sederhana ini memungkinkan Anda dengan cepat mendapatkan kereta sesuai jadwal Anda. Anda dapat menyesuaikan waktu pergerakan dan waktu pemberhentian kereta. Akselerasi dan pengereman kereta juga dapat dikonfigurasi. Dengan mengubah parameter jadwal dalam sketsa, Anda dapat membuat semua jenis gerakan otomatis. Nyalakan saja dan kereta Anda berangkat.
Mengubah parameter waktu dalam sketsa:
// 1 | 0> Waktu <5 detik (counterScheduler <=5) { ......// 2 | 10 detik> Waktu <15 detik ((penjadwal penghitung>=10) &&(penjadwal penghitung <=15)) { ......// 3 | Ubah arahif (counterScheduler ==16) {.... etc. membuat jadwal.
Variabel:
int pengeremanDelta =5; int akselerasiDelta =6; tentukan parameter pergerakan kereta
Arah kereta ditentukan oleh status pin D6 dan D7:
// Setel arah default ke FORWARD digitalWrite(L298_IN1, HIGH); digitalWrite(L298_IN2, RENDAH);
Anda dapat mengubah sketsa ini tanpa henti untuk mendapatkan opsi baru untuk pergerakan kereta otomatis.
Selamat datang!
Kode
- Ayun
Ayunkan Arduino
// L298 #define L298_ENA 5#define L298_IN1 6#define L298_IN2 7// SCRIPTS VARIABLESint counterScheduler;unsigned long timerScheduler =0;unsigned long timerLocal =0;byte speedAuto =0;void setup() {// Inisialisasi pin pinMode(L298_ENA, OUTPUT); pinMode(L298_IN1, OUTPUT); pinMode(L298_IN2, OUTPUT);// Setel arah default ke FORWARD digitalWrite(L298_IN1, HIGH); digitalWrite(L298_IN2, RENDAH); }void loop() { // Mulai Scheduler if (millis()> (timerScheduler + 1000)) { // Centang setiap 1 detik counterScheduler++; timerScheduler =milis(); } // ------------- SCRIPT SWING int brakingDelta =5; int percepatanDelta =6; // 1 | 0> Waktu <5 detik if (counterScheduler <=5) { // Mulai kereta if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + speedDelta; lain speedAuto =255; analogWrite(L298_ENA, speedAuto); timerLocal =milis(); } } // 2 | 10 detik> Waktu <15 detik if ((counterScheduler>=10) &&(counterScheduler <=15)) { // Berhenti kereta setelah 10 detik // Berhenti kereta if (millis()> (timerLocal + 100)) { if ( speedAuto> 30) speedAuto =speedAuto - pengeremanDelta; lain kecepatanOtomatis =0; analogWrite(L298_ENA, speedAuto); timerLocal =milis(); } } // 3 | Ubah arah if (counterScheduler ==16) { digitalWrite(L298_IN1, LOW); digitalWrite(L298_IN2, TINGGI); } // 4 | 20 detik> Waktu <30 detik if ((counterScheduler>=20) &&(counterScheduler <=30)) { // Mulai kereta if (millis()> (timerLocal + 100)) { if (speedAuto <240) speedAuto =speedAuto + mempercepat Delta; lain speedAuto =255; analogWrite(L298_ENA, speedAuto); timerLocal =milis(); } } // 5 | 31 detik> Waktu <40 detik if ((counterScheduler>=31) &&(counterScheduler <=40)) { // Berhenti kereta // Berhenti kereta if (millis()> (timerLocal + 100)) { if (speedAuto> 30 ) speedAuto =speedAuto - pengeremanDelta; lain kecepatanOtomatis =0; analogWrite(L298_ENA, speedAuto); timerLocal =milis(); } } // 6 | Kembali ke Langkah 1 if (counterScheduler> 40) { counterScheduler =0; digitalWrite(L298_IN1, TINGGI); digitalWrite(L298_IN2, RENDAH); }} Skema
Proses manufaktur
-
Kontrol Proses Proses Teknologi
Kontrol Proses dari Proses Teknologi Proses teknologi terdiri dari penanganan, pengerjaan, pemurnian, penggabungan, dan manipulasi bahan dan cairan untuk menghasilkan produk akhir yang menguntungkan. Proses ini bisa menjadi proses yang tepat, menuntut, dan berpotensi berbahaya. Perubahan kecil dal
-
Sistem Kontrol Lampu Jalan Otomatis menggunakan LDR &Transistor BC 547
Proyek Elektronik Dasar – Sistem Kontrol Lampu Jalan Otomatis Berikut adalah proyek Listrik/Elektronik sederhana baru kami tentang Sistem Kontrol Lampu Jalan Otomatis untuk pelajar dan penggemar . Fitur: Ini adalah konsep sederhana dan kuat, yang menggunakan transistor (BC 547 NPN) sebagai sake
-
Sistem Kontrol Gerbang Kereta Api Otomatis – Sirkuit &Kode Sumber
Sirkuit Pengontrol Gerbang Kereta Api Otomatis Kecepatan Tinggi Menggunakan Sensor Arduino dan Ultrasonik Dalam tutorial ini, kita akan belajar bagaimana merancang sistem pengontrol gerbang kereta api kecepatan tinggi otomatis yang sederhana dan efisien. Ini adalah pendekatan yang relatif sederhana
-
Apa itu Kontrol Inventaris?
Definisi Kontrol Inventaris Kontrol inventaris, juga disebut sebagai kontrol stok, sangat luas dan menggabungkan begitu banyak fungsi sehingga sulit untuk dijelaskan dalam definisi terbatas, tetapi kami menyukai cara entri Inc.com ini:Kontrol inventaris mengacu pada “ semua aspek pengelolaan inventa