

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
Hai Guyzz...
Dalam pandemi ini saya percaya semua orang di rumah tetap aman.
Saya membuat proyek baru bernama Human Mengikuti Bot.
tonton seluruh video untuk membuat proyek ini di rumah.
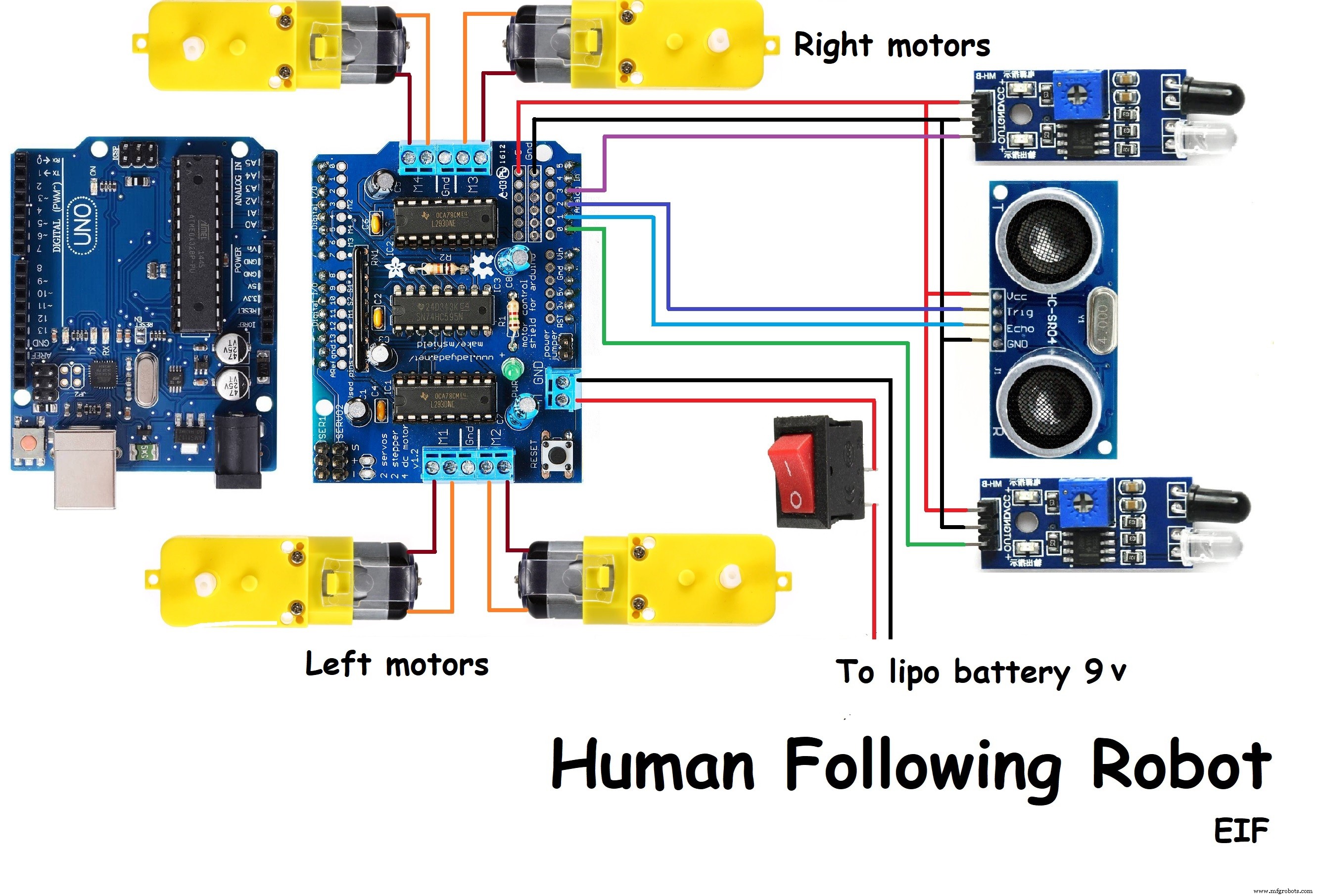
Ini menggunakan 2 sensor IR dan sensor ultrasonik. Sensor IR digunakan untuk mengikuti manusia atau objek dan sensor ultrasonik digunakan untuk menggerakkan kembali robot.
Jika Anda menyukai proyek ini, hormati.
Beri saya saran agar saya dapat meningkatkannya atau masukan apa pun yang ingin Anda berikan ke saluran YouTube saya.
tautannya adalah:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Anda juga dapat memberi saya saran tentang "Apa yang saya buat proyek selanjutnya.?"
Stepstomakeproyek ini:
1. Kumpulkan komponen seperti Arduino, motor bergigi DC dengan roda, 2 sensor IR, sensor ultrasonik, motor servo, kardus, pelindung driver motor l293d, baterai 9 v, sakelar, kabel Jumper, dll.
2. Ambil karton dan letakkan keempat motor beroda di atasnya untuk membuat mobil.
3. Tempatkan sensor IR di mobil.
4. Tempelkan motor servo pada mobil.
5. Tempatkan sensor ultrasonik di dalam kotak dan tambahkan pegangan ke dalamnya setelah itu hubungkan ke motor servo.
6. Hubungkan pelindung motor arduino dan l293d di mobil.
7. Lakukan koneksi seperti yang ditunjukkan pada diagram sirkuit.
8. Unggah kode dan sambungkan sakelar dengan baterai ke pelindung driver motor l293d.
Sesuaikan sensitivitas sensor IR.
Proyek Anda sudah siap...!!!
Kunjungi saluran YouTube saya sekali dan lihat lebih banyak proyek menarik.
"Elektronik Itu Menyenangkan"
Jika Anda menyukai saluran saya, silakan berlangganan.
tautan:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // Trigger pin #define KANAN A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);Servo myservo; int pos =0;lama;pengaturan batal(){Serial.begin(9600);myservo.attach(10);untuk(pos =90; pos <=180; pos +=1){myservo.write(pos);delay(15);} untuk(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}untuk(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(KANAN, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void loop() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print(" L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(jarak); if((Right_Value==1) &&(distance>=10 &&distance<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0)){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(jarak> 5 &&jarak <10){stop();}else if(jarak <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, RENDAH); delayMicroseconds(2); digitalWrite(trigpin, TINGGI); delayMicroseconds(10); waktu =pulseIn (echopin, TINGGI); waktu kembali / 29 / 2;}void forword(){// hidupkan majuMotor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}void backword(){ // sebaliknyaMotor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed(120);Motor2.run(Mundur);Motor3.setSpeed(120);Motor3.run(Mundur); Motor4.setSpeed(120);Motor4.run(Mundur); }void turnRight(){ // yang lain rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(Mundur) );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){ // hidupkan ke kiriMotor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(BACKWARD);Motor3.setSpeed(200);Motor3.run(FORWARD);Motor4.setSpeed(200);Motor4.run(FORWARD);}void stop(){ //stopMotor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
Proses manufaktur
Komponen dan persediaan Arduino Nano R3 × 1 Driver motor H-Bridge Ganda Instrumen Texas L293D × 1 Motor servo mikro SG90 × 1 motor stepper dari DVD ROM × 1 JLCPCB PCB yang Disesuaikan × 1 Alat dan mesin yang diperlukan Pemotong laser (g
Komponen dan persediaan Arduino Nano R3 × 2 Modul nRF24 (Generik) × 2 SparkFun Dual H-Bridge driver motor L298 × 1 Kabel jumper (generik) × 1 Motor DC, 12 V × 2 Alat dan mesin yang diperlukan Besi solder (generik) Pistol lem p
Komponen dan persediaan SparkFun Dual H-Bridge driver motor L298 × 1 Motor DC (generik) × 4 Arduino UNO × 1 LED (generik) × 8 Resistor 221 ohm × 8 Servo (Tower Pro MG996R) × 1 Sensor Ultrasonik - HC-SR04 (Generik) × 1 A
Komponen dan persediaan Sensor Ultrasonik - HC-SR04 (Generik) × 2 Arduino Nano R3 × 1 Resistor foto × 1 Maxim Integrated 8x8 LED Matrix MAX7219 × 2 Ukuran Setengah Papan Tempat Memotong Roti Tanpa Solder × 1 Kabel jumper (generik) × 1