

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
 |
| × | 1 |
 |
|
Sebelumnya saya telah menyediakan library Arduino untuk motor stepper tipe unipolar. Ini dengan sempurna mengontrol kecepatan, arah, jumlah putaran, sudut motor dll semua parameter motor stepper tipe unipolar. Tapi itu hanya untuk motor stepper tipe unipolar. Seperti yang kita ketahui motor stepper mungkin juga tipe bipolar. Namun library ini tidak dapat mengontrol motor stepper tipe bipolar. Jadi saya telah memutuskan untuk mengembangkan perpustakaan arduino lain untuk mengontrol motor stepper tipe bipolar
Jadi, berikut ini saya sajikan library motor stepper bipolar di Arduino untuk semua motor stepper tipe bipolar. Library memiliki 9 fungsi berbeda yang dapat digunakan untuk memutar dan mengontrol motor sesuai kebutuhan. Perpustakaan dirancang sesuai dengan kontrol gerak industri persyaratan. Berikut adalah beberapa fitur perpustakaan ini
1. Mengontrol motor stepper bipolar
2. Mengontrol arah putaran motor
3. Akurat mengontrol jumlah putaran motor seperti 1, 2, 3, 4,.....
4. Mengontrol kecepatan motor secara akurat dalam RPM dengan akurasi 95%
5. Memutar motor secara akurat sesuai keinginan sudut antara 0 – 360o dengan akurasi 80-100%
6. Kompatibel dengan semua papan arduino
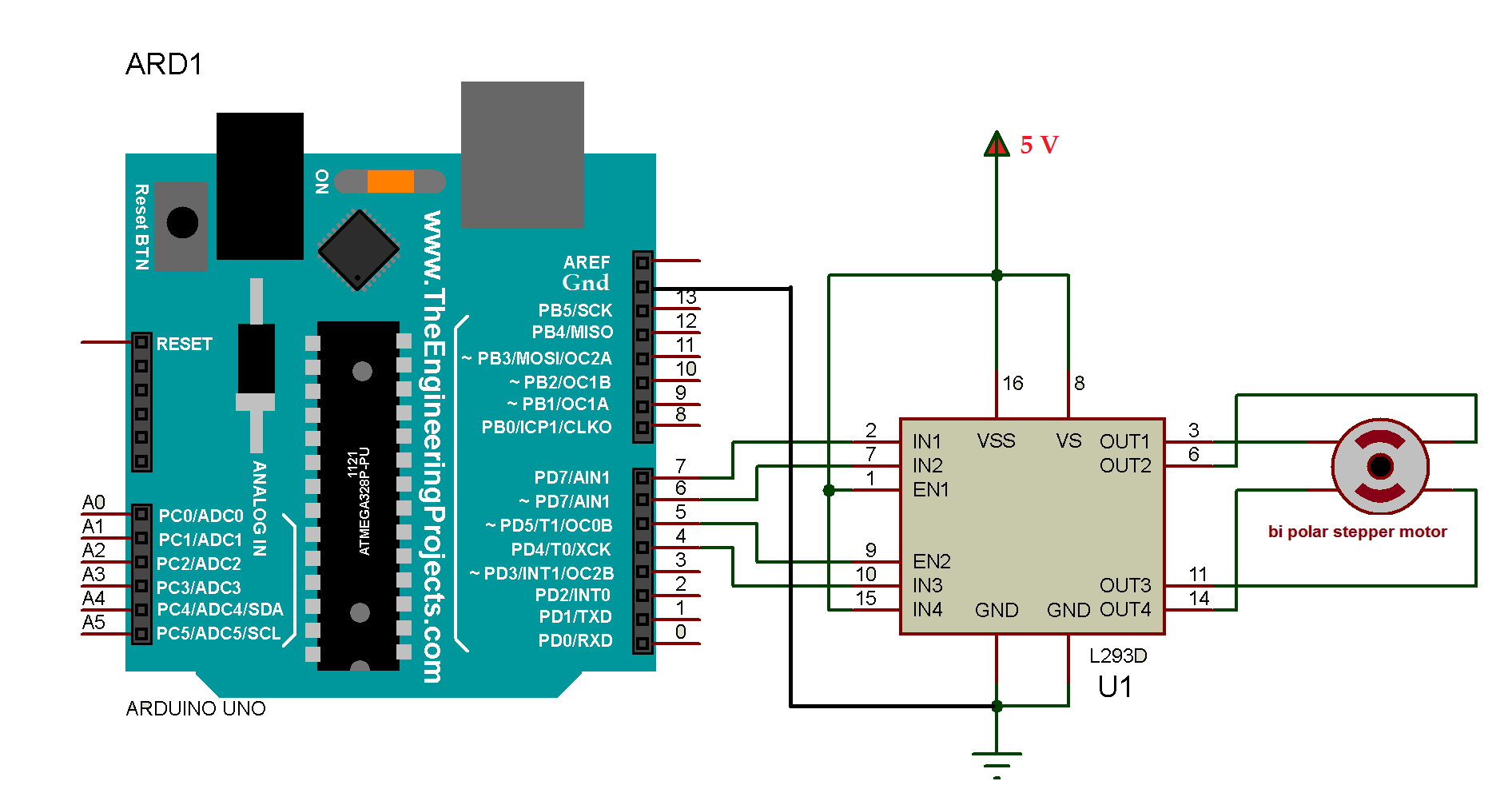
Deskripsi singkat dari semua fungsi perpustakaan diberikan di sini. Beberapa contoh diberikan setelahnya yang menjelaskan bagaimana motor dikendalikan menggunakan perpustakaan ini. Satu video juga diberikan yang menunjukkan demonstrasi contoh-contoh ini. Akhirnya, rangkaian disarankan menggunakan chip L293D - banyak digunakan sebagai driver H-bridge untuk motor DC serta motor stepper bi polar.
Untuk menggunakan perpustakaan ini di sketsa arduino Anda, cukup salin bi_polar_Stepper folder ke direktori root folder perpustakaan arduino seperti C:\arduino-1.6.7\libraries
Deskripsi fungsi perpustakaan:
1) bi_polar_Stepper(intpin1, int pin2, int pin3, int pin4) - ini akan membuat instance bi_polar_Stepper dalam sketsa arduino dengan pin driver motor stepper. Berarti kita harus menentukan pin board arduino yang digunakan untuk menggerakkan motor stepper
2) set_step_per_rev(intsteps)- fungsi ini akan mengatur jumlah langkah yang diperlukan oleh motor stepper untuk menyelesaikan 1 putaran. Berarti akan mengatur sudut langkah (step resolution) dari motor. Seseorang harus memasukkan sudut langkah motor untuk kontrol yang akurat
3) set_RPM(int rpm) – fungsi ini akan mengatur kecepatan motor dalam RPM dan motor akan berputar pada kecepatan yang dipilih dengan akurasi hingga 95%
4) rotate_CW() - fungsi ini akan mulai memutar motor searah jarum jam. Untuk memutar motor searah jarum jam terus menerus kita harus menggunakan fungsi ini dalam loop terus menerus
5) rotate_CCW() - fungsi ini akan mulai memutar motor berlawanan arah jarum jam. Untuk memutar motor berlawanan arah jarum jam secara terus menerus kita harus menggunakan fungsi ini secara terus menerus
6) putar(int dir)- fungsi ini akan memutar motor sesuai arah yang dipilih. Jika arah diberikan sebagai 1 maka motor akan berputar searah jarum jam dan sebaliknya
7) rotate_one_rev(intdir)- fungsi ini akan memutar motor tepat 1 putaran ke arah yang dipilih
8) rotate_n_rev(int dir, intnum)- fungsi ini akan memutar motor jumlah putaran yang diperlukan dalam arah yang dipilih
9) rotate_x_deg(int deg) – fungsi ini akan memutar motor ke sudut yang diinginkan dari 0 – 360o di kedua arah dengan akurasi sudut 80 –100%
Contoh:
1) Putar motor terus menerus ke segala arah pada 60 RPM
/*program ini akan terus memutar motor stepper bipolar
* dengan sudut langkah 1,8 derajat (200 langkah/putaran) pada 60 RPM
* dibuat oleh Ashutosh Bhatt pada 12/12/16
*/
#include
#define langkah 200 // ubah langkah ini sesuai motor
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
int rpm =60;
batalkan pengaturan()
// letakkan kode pengaturan Anda di sini, untuk dijalankan sekali:
Serial.begin(9600);
Serial.println("program uji perpustakaan motor stepper bipolar");
my_step_motor.set_step_per_rev(langkah);
my_step_motor.set_RPM(rpm);
Serial.println("motor berputar searah jarum jam");
}
void loop()
my_step_motor.rotate_CW();
}
2) Putar motor satu putaran searah jarum jam dan satu putaran berlawanan arah jarum jam terus menerus
/*program ini akan memutar motor stepper bipolar
* dengan sudut langkah 1,8 derajat (200 langkah/putaran)
* sebagai 1 putaran searah jarum jam (CW) dan satu putaran
* berlawanan arah jarum jam (CCW) pada 30 RPM terus menerus
* dibuat oleh Ashutosh Bhatt pada 12/12/16
*/
#sertakan
#tentukan langkah 200
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
int rpm =30;
batalkan pengaturan()
// letakkan kode pengaturan Anda di sini, untuk dijalankan sekali:
Serial.begin(9600);
Serial.println("program uji perpustakaan motor stepper bipolar yang dibuat oleh Ashutosh Bhatt");
my_step_motor.set_step_per_rev(langkah);
my_step_motor.set_RPM(rpm);
}
void loop()
Serial.println("motor berputar searah jarum jam");
my_step_motor.rotate_one_rev(1);
penundaan(1000);
Serial.println("motor berputar berlawanan arah jarum jam");
my_step_motor.rotate_one_rev(0);
penundaan(1000);
}
3) Putar motor searah jarum jam pada 100 RPM dan berlawanan arah jarum jam pada 50 RPM terus menerus
/*program ini akan memutar motor stepper bipolar terlebih dahulu
* dengan sudut langkah 1,8 derajat (200 langkah/putaran)
* searah jarum jam(CW) selama 2 putaran pada 100 RPM dan kemudian
* berlawanan arah jarum jam (CCW) selama 2 putaran pada 50 RPM
*terus menerus
* dibuat oleh Ashutosh Bhatt pada 12/12/16
*/
#sertakan
#tentukan langkah 200
bi_polar_Stepper my_step_motor(2, 3, 4, 5);
int saya;
batalkan pengaturan()
Serial.begin(9600);
Serial.println("Program uji perpustakaan motor stepper Bipolar dibuat oleh Ashutosh Bhatt");
my_step_motor.set_step_per_rev(langkah);
}
void loop()
my_step_motor.set_RPM(100);
untuk(i=0;i<100;i++) my_step_motor.rotate(1);
delay(2000);
my_step_motor.set_RPM(50);
for(i=0;i<100;i++) my_step_motor.rotate(0);
delay(2000);
}
4) Putar motor 4 putaran searah jarum jam pada 20 RPM dan 2 putaran berlawanan arah jarum jam pada 10 RPM terus menerus
/*program ini akan memutar motor stepper bipolar terlebih dahulu
* dengan sudut langkah 1,8 derajat (200 langkah/putaran)
* 4 putaran searah jarum jam (CW) pada 20 RPM dan kemudian
* 2 putaran berlawanan arah jarum jam (CCW) pada 10 RPM
*terus menerus
* dibuat oleh Ashutosh Bhatt pada 12/12/16
*/
#sertakan
#tentukan langkah 200
bi_polar_Stepper my_step_motor(2, 3, 4, 5);
int saya;
batalkan pengaturan()
Serial.begin(9600);
Serial.println("Program uji perpustakaan motor stepper Unipolar dibuat oleh Ashutosh Bhatt");
my_step_motor.set_step_per_rev(langkah);
}
void loop()
my_step_motor.set_RPM(20);
my_step_motor.rotate_n_rev(1, 4);
delay(2000);
my_step_motor.set_RPM(10);
my_step_motor.rotate_n_rev(0, 2);
delay(2000);
}
5) Putar motor 90o searah jarum jam dan 90o berlawanan arah jarum jam terus menerus pada 30 RPM
/*program ini akan memutar motor bipolar
* dengan sudut langkah 1,8 derajat (200 langkah/putaran) pada 30 RPM hingga
* 90 derajat CW dan 90 derajat CCW terus menerus
* dibuat oleh Ashutosh Bhatt pada 22/10/16
*/
#include
#define motor_steps 200
bi_polar_Stepper my_step_motor(8, 9, 10, 11);
int rpm =30;
batalkan pengaturan()
// letakkan kode pengaturan Anda di sini, untuk dijalankan sekali:
Serial.begin(9600);
Serial.println("program uji perpustakaan motor stepper bipolar");
my_step_motor.set_step_per_rev(motor_steps);
my_step_motor.set_RPM(rpm);
Serial.println("motor berputar 90 derajat maju mundur");
}
void loop()
my_step_motor.rotate_x_deg(90);
delay(2000);
my_step_motor.rotate_x_deg(270);
delay(2000);
}
Catatan:-Jika motor stepper memiliki peringkat arus dan tegangan yang lebih tinggi daripada chip L293D, kita dapat menggunakan chip L298 atau set 4 transistor Darlington yang terpisah seperti TIP122, TIP142 dll dapat digunakan untuk menggerakkan motor stepper.
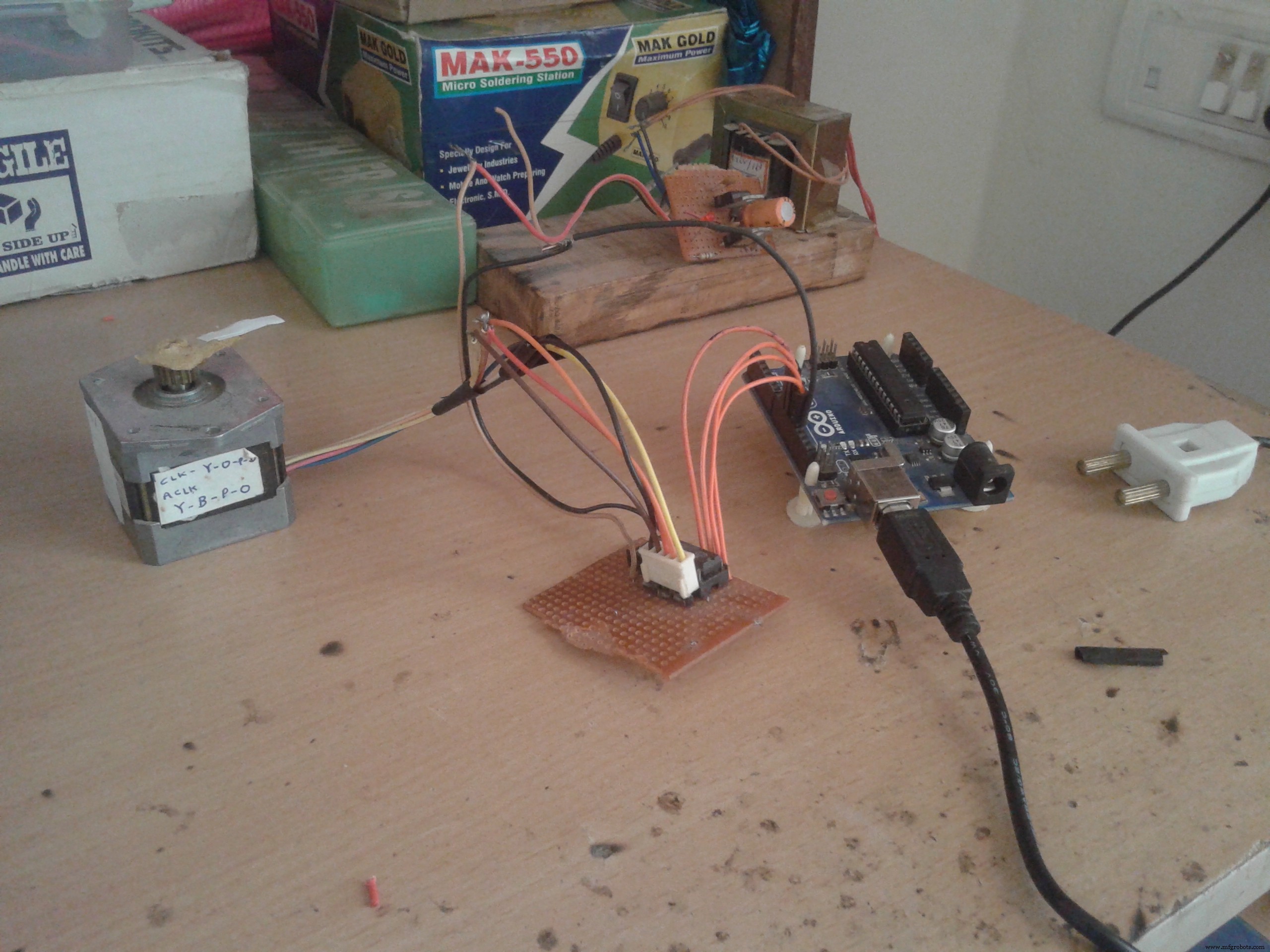
Pustaka yang diberikan dan program contoh bersama dengan rangkaian di atas diuji dengan motor stepper berikut
1) Motor bipolar 2 fase dengan 5V, 100 RPM (MAX), 200 langkah/putaran (sudut langkah 1,8o)
2) Motor bipolar 2 fase dengan 5V, 60 RPM (MAX), 200 langkah/putaran (sudut langkah 1,8o)
Tanpa pratinjau (hanya unduh).
Proses manufaktur
Motor stepper membagi putaran penuh menjadi beberapa langkah yang sama untuk mencapai kontrol posisi yang presisi. Topik diskusi hari ini adalah 28BYJ-48 unipolar delapan ketukan empat fase motor stepper permanen yang digerakkan oleh magnet. Misalkan Anda sedang mengerjakan sebuah proyek dan membu
Motor adalah komponen penting saat mengubah energi dalam koneksi sistem Anda. Yang penting, bagi penggemar elektronik yang mencari motor, prioritas Anda adalah menemukan motor yang andal dengan efisiensi motor tinggi. Oleh karena itu, artikel ini membahas motor stepper nema23, konfigurasi pinnya, sp
Izinkan kami membantu mengajari Anda cara memilih perusahaan untuk perbaikan motor stepper Anda. Apa itu Motor Stepper? Motor stepper adalah perangkat elektromekanis yang mencapai gerakan mekanis dari konversi pulsa listrik. Alih-alih tegangan yang diberikan secara terus-menerus, ia digerakkan ol
Komponen dan Koneksi Sistem Sherline CNC. Komponen Sistem 1) Handwheel manual 1-5/8″2) Motor stepper sumbu Z3) Dudukan motor stepper4) Mill vertikal Sherline dengan aksesori standar (Model 2000 mill ditampilkan)5) Cadangan CD penginstalan Linux/EMC2, CD instruksi Sherline6) Motor stepper sumbu Y7