

Proses manufaktur

Manufaktur industri
 |
| × | 1 | |||
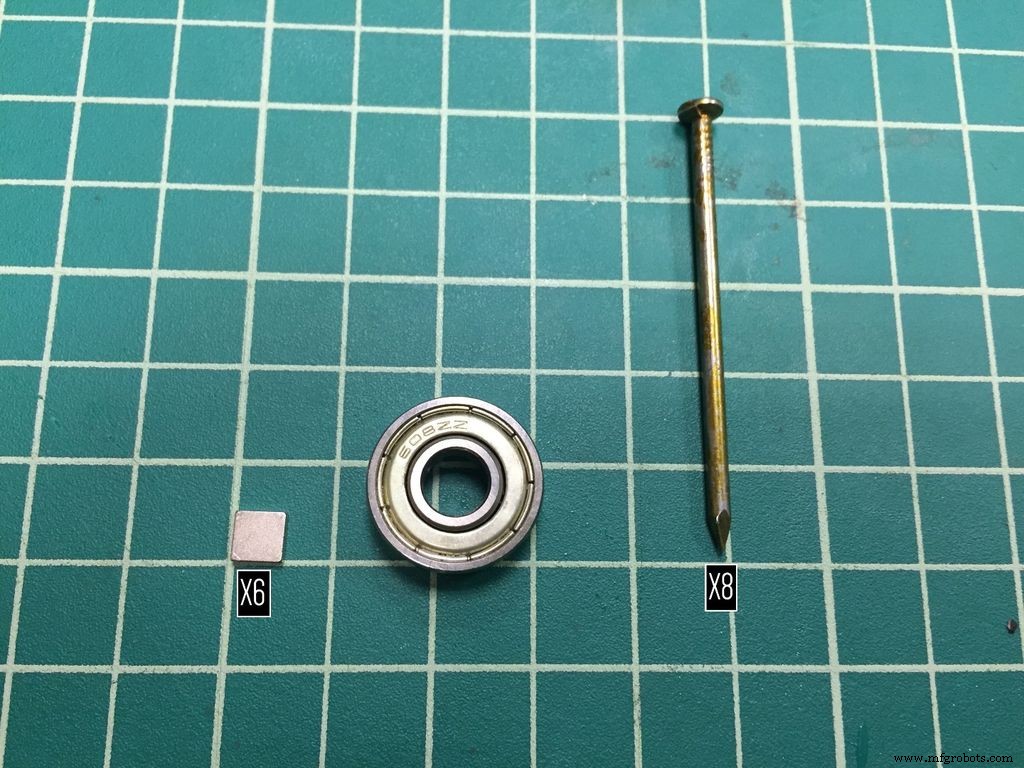
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Baru-baru ini saya menemukan instruksi dari Motor DC Cetak 3D ini dan saya pikir saya dapat mengambil langkah lebih jauh; Secara harfiah. Saya merancang motor stepper ini dengan delapan elektromagnet, enam magnet neodymium, dengan rotor cetak 3d dan rumah stator. Ini secara khusus merupakan motor stepper magnet permanen yang mampu melakukan langkah penuh 15 derajat dan setengah langkah 7,5 derajat. Ada banyak jenis motor stepper tetapi kebanyakan dari mereka bekerja sangat mirip dengan yang saya rancang di sini. Ini adalah tampilan pendidikan untuk menunjukkan kepada orang lain bagaimana motor stepper bekerja. Saya merancang ini untuk berjalan pada catu daya 5-12VDC sehingga akan bekerja dengan sebagian besar catu daya USB.
Saya juga mengadakan giveaway di channel Youtube saya. Saya akan memberikan arduino, transistor yang digunakan dalam proyek ini, dan beberapa sakelar. Lebih detail di langkah terakhir.


Cetak dengan Hub 3D!



Gunakan kompas untuk menentukan kutub magnet Anda dan rekatkan magnet dengan kutub utara menghadap ke luar. Jika magnet Anda cukup kuat, kompas pada beberapa smartphone akan menunjukkan polaritas magnet.
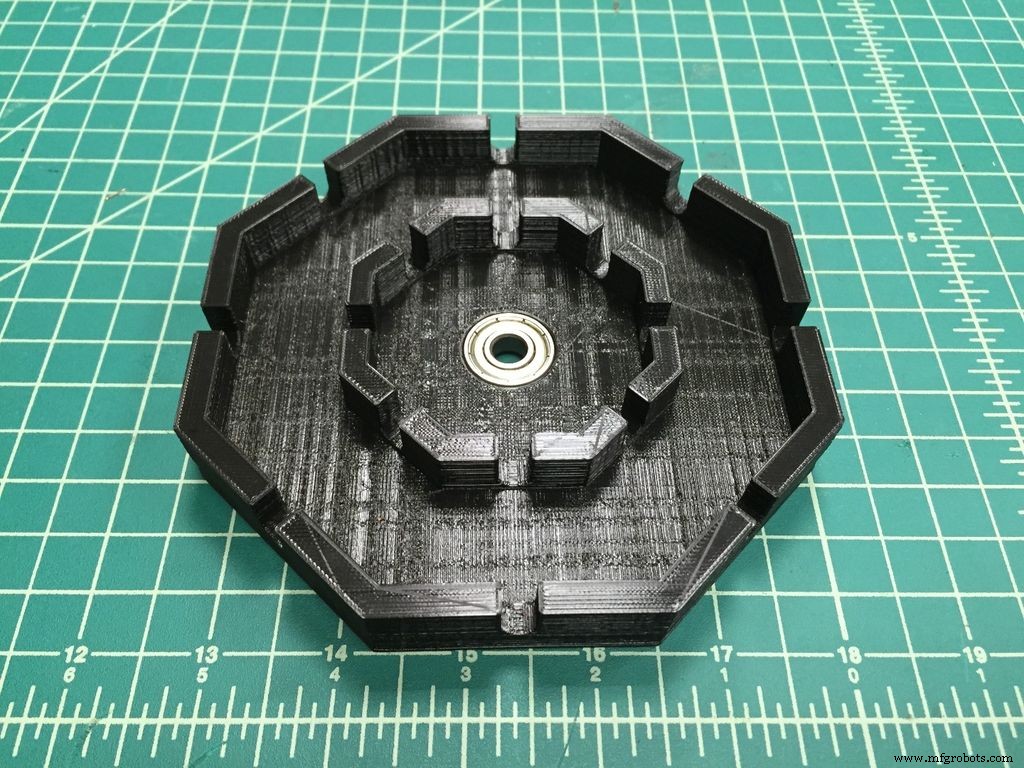

Tekan pas bantalan ke stator lalu tekan rotor ke bantalan. Saya sangat terkejut betapa cocoknya bantalan pers dengan stator. Saat mencetak 3d, lubang cenderung mengecil ke dalam dan berakhir lebih kecil dari yang diharapkan, jadi saya biasanya membuatnya sedikit kebesaran.
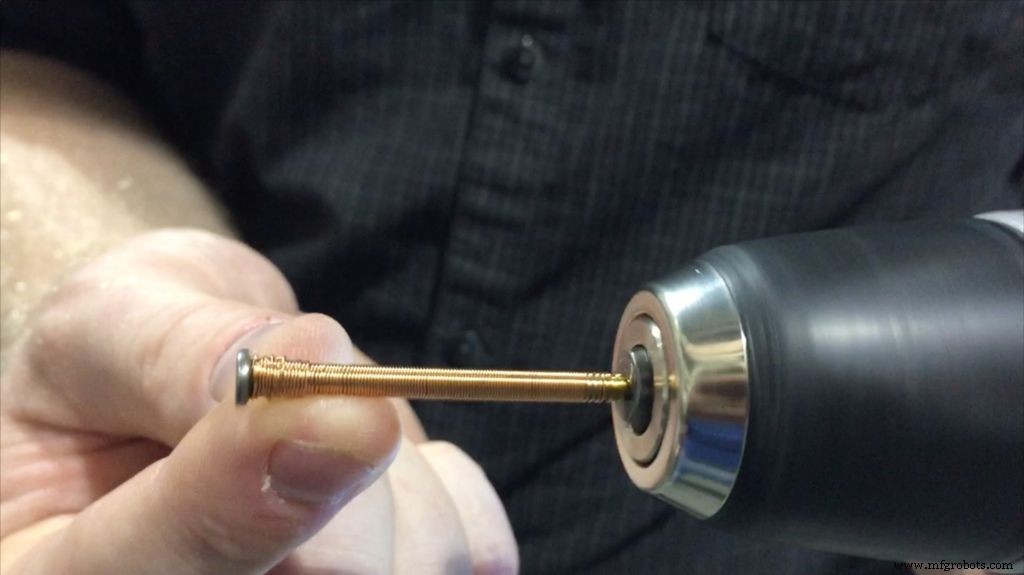

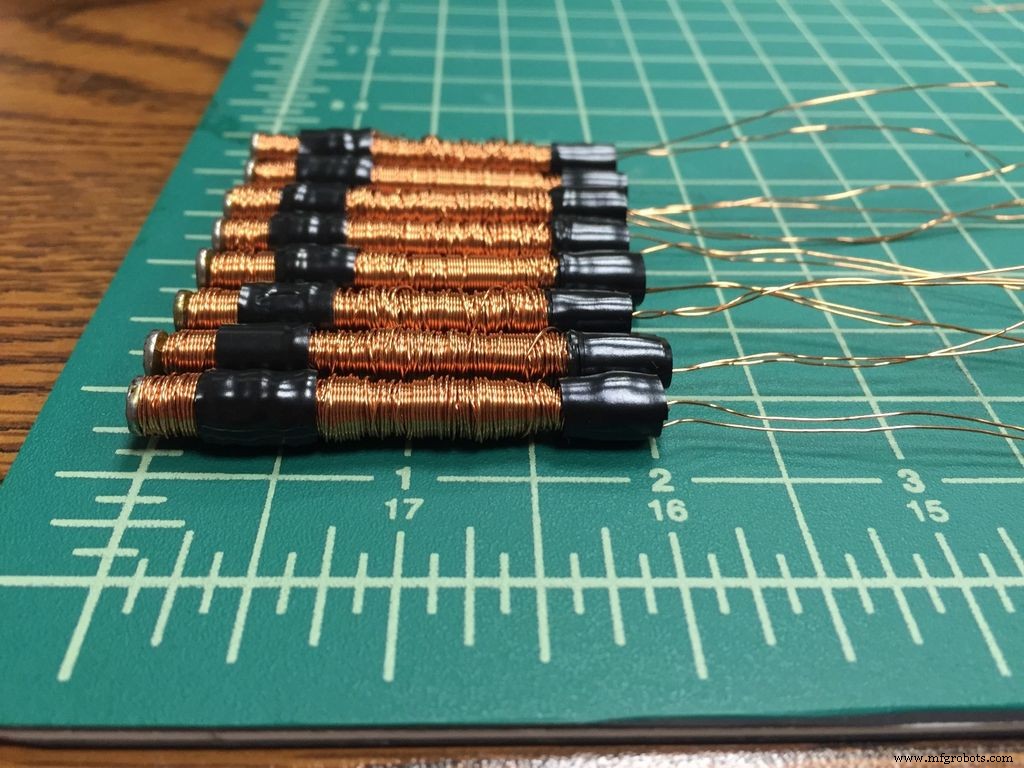
Potong 9 potong kawat hingga 25 kaki dan gulung dengan bor. Gunakan kompas dan baterai untuk menentukan konfigurasi yang diperlukan untuk memberi Anda kutub selatan di ujung paku. Gunakan spidol atau tabung panas menyusut untuk menandai ujung negatif elektromagnet Anda. Bungkus bagian elektromagnet dengan pita listrik di mana mereka akan bersentuhan dengan rumah stator. Ini melayani dua tujuan. Ini dengan kuat mengamankan elektromagnet di tempatnya dan juga melindungi rumahan dari panas apa pun yang dihasilkan koil. Pasangan koil menarik sekitar 1 amp dengan catu daya 5V yang saya gunakan. Transistor yang saya pilih dapat ditangani menggunakan catu daya 12V yang koilnya menarik sekitar 3 amp. Masalah dengan suplai tegangan yang lebih tinggi adalah jika saya membiarkannya menyala sebentar, kumparan mulai menjadi hangat.
Peringatan:
Saya merancang ini untuk berjalan pada catu daya 5-12VDC. Jika Anda memutuskan untuk menyimpang dari jalur, gunakan Hukum Ohm untuk menentukan ukuran gulungan yang Anda inginkan. V =I*R
Ingat, semakin sedikit belitan pada koil Anda, semakin rendah resistansinya. Jika Anda tidak hati-hati, kumparan Anda akan menarik lebih banyak arus daripada yang dapat ditangani oleh catu daya atau transistor Anda dan hal-hal buruk akan terjadi.
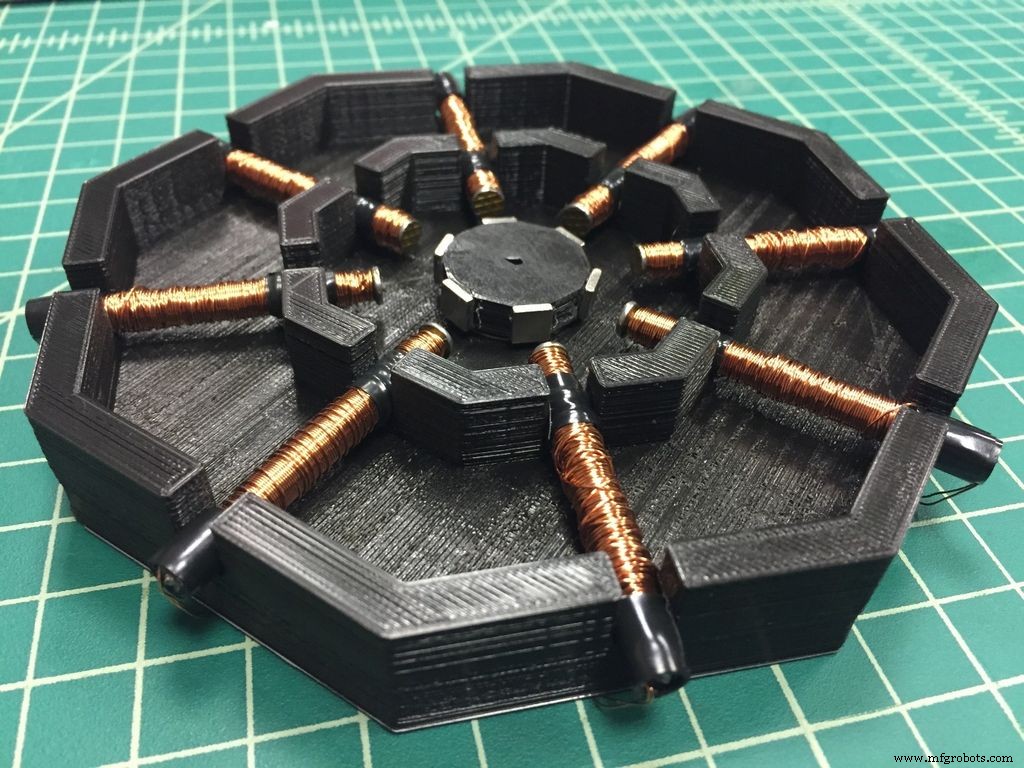
Dorong elektromagnet ke dalam stator sampai sekitar 1/4" dari magnet neodymium. Anda dapat menggeser elektromagnet masuk dan keluar sesuai keinginan, tetapi saya tidak ingin mereka terlalu dekat karena paku akan menjadi magnet lebih cepat. Itulah kerugian menggunakan paku. Motor akan tetap bekerja setelah dimagnetisasi, tetapi akan menjadi kurang efisien. Batang las adalah alternatif yang baik untuk paku jika Anda memiliki paku yang tergeletak di sekitar.
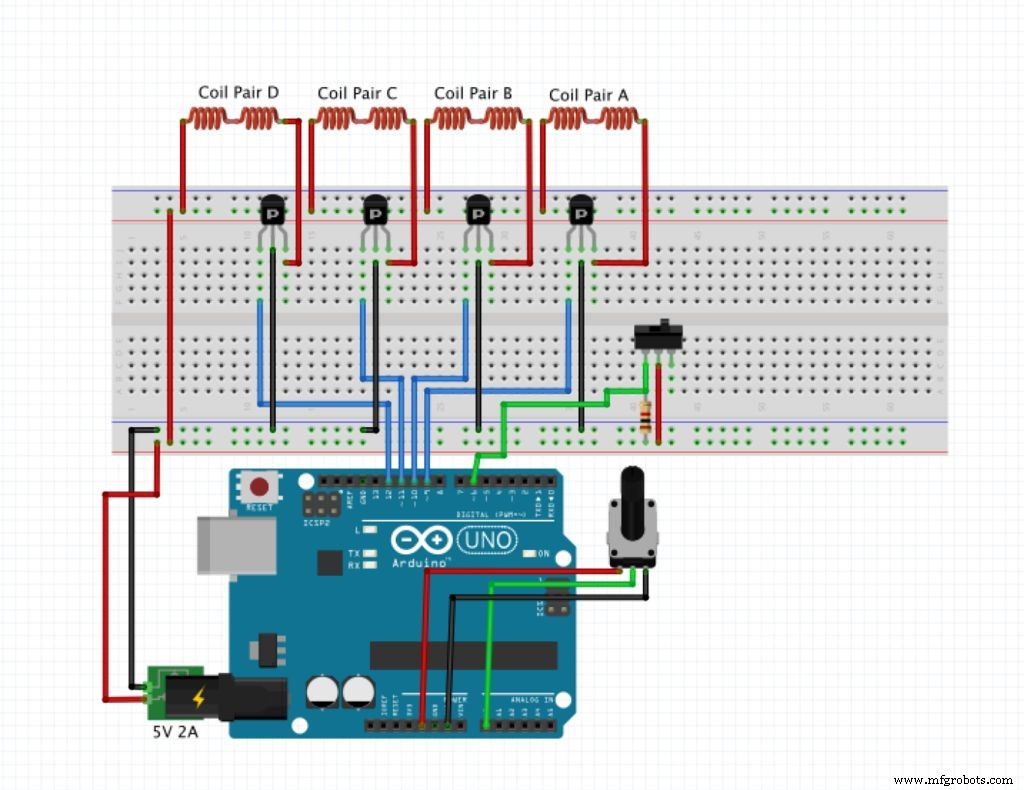
Pasangkan pasangan kumparan Anda secara seri dan sambungkan sehingga semua kutub selatan elektromagnet menghadap ke dalam. Resistor yang saya gunakan dalam skema adalah resistor 1k. Tujuannya agar pin digital tidak “mengambang” tinggi saat dalam posisi off. Sekali lagi, pastikan untuk menggunakan transistor yang mampu menahan arus yang dibutuhkan kumparan Anda.
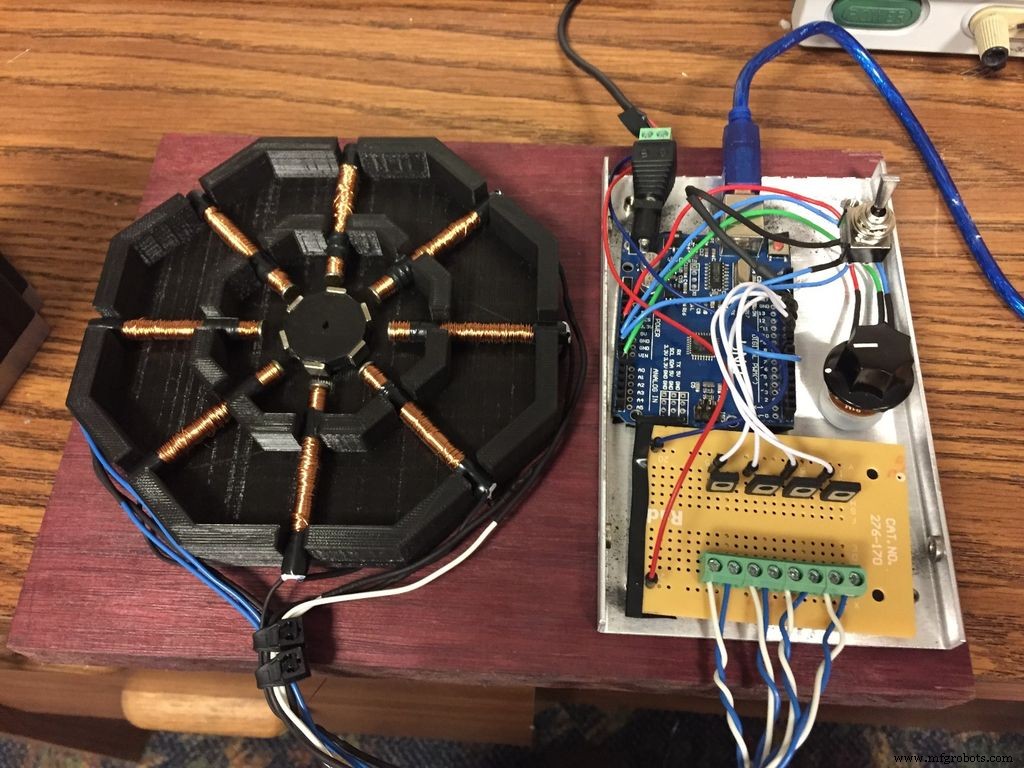
Muat kode sumber ke arduino Anda dan Anda siap untuk pergi!

Saya akan memberikan arduino, transistor yang digunakan dalam proyek ini, bersama dengan beberapa sakelar dan kabel jumper.
Aturan untuk giveaway:
Berlangganan ke . saya Saluran YouTube, seperti video ini dan tinggalkan komentar di video yang mengatakan apa yang Anda ingin lihat saya buat selanjutnya. Pada tanggal 1 September saya akan memilih komentar pelanggan secara acak dan mengirimkannya secara gratis! Terima kasih telah menjadi komunitas yang ramah!
/*010100000111001001101111011101000110111100100000010001113D Printed Stepper MotorDibuat 15 Agustus 2015Dimodifikasi 15 Agustus 2015oleh Anthony Garofalo (Proto G)Kunjungi channel YouTube saya di sini:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwKunjungi halaman saya http:/ /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ |___] |___/ | | | | | | ____ | | \_ |_____| | |_____| |_____| 01010000011100100110111101110100011011110010000001000111*/int Delay;int reverseSwitch;void setup() { // menginisialisasi pin digital 13 sebagai output. pinMode(9, OUTPUT); pinMode(10, OUTPUT); pinMode(11, OUTPUT); pinMode(12, OUTPUT); pinMode(13, OUTPUT); //pin led untuk visual pinMode(6, INPUT); //sakelar sakelar terhubung ke pin 6 digital untuk membalikkan arah }void loop() { reverseSwitch =digitalRead(6); if(reverseSwitch ==HIGH){//jika reverse switch tinggi, putar rotor berlawanan arah jarum jam Delay =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(12, TINGGI); digitalWrite(13, TINGGI); penundaan (Penundaan); digitalWrite(12, RENDAH); digitalWrite(13, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(11, TINGGI); penundaan (Penundaan); digitalWrite(11, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(10, TINGGI); digitalWrite(13, TINGGI); penundaan (Penundaan); digitalWrite(10, RENDAH); digitalWrite(13, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(9, TINGGI); penundaan (Penundaan); digitalWrite(9, RENDAH); penundaan (5); } else{//jika sakelar mundur tidak tinggi, putar rotor searah jarum jam Delay =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(9, TINGGI); digitalWrite(13, TINGGI); penundaan (Penundaan); digitalWrite(9, RENDAH); digitalWrite(13, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(10, TINGGI); penundaan (Penundaan); digitalWrite(10, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(11, TINGGI); digitalWrite(13, TINGGI); penundaan (Penundaan); digitalWrite(11, RENDAH); digitalWrite(13, RENDAH); penundaan (5); Penundaan =analogRead(0); Penundaan =peta(Penundaan, 0, 1023, 60, 2000); digitalWrite(12, TINGGI); penundaan (Penundaan); digitalWrite(12, RENDAH); penundaan (5); } } 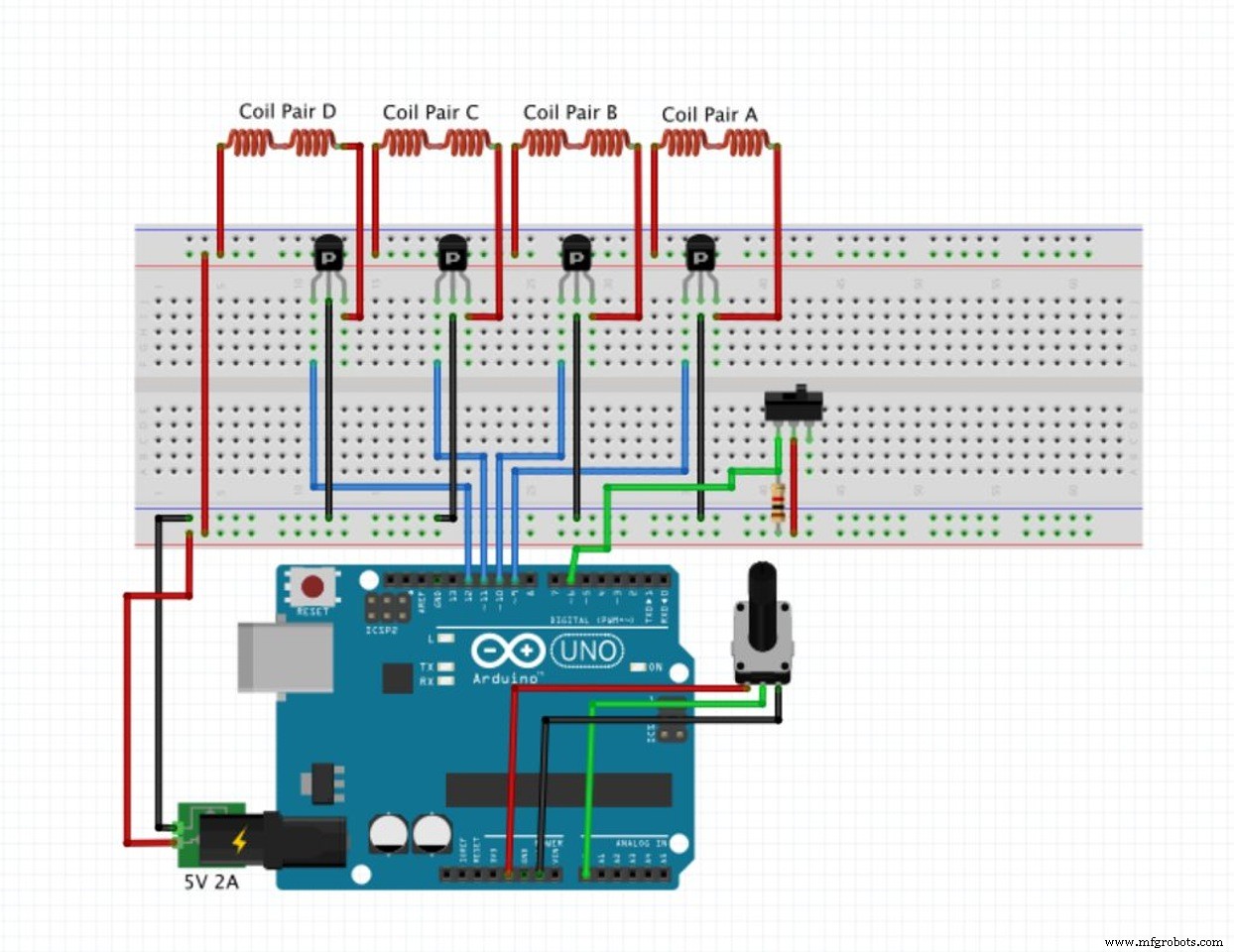
Proses manufaktur
Motor stepper membagi putaran penuh menjadi beberapa langkah yang sama untuk mencapai kontrol posisi yang presisi. Topik diskusi hari ini adalah 28BYJ-48 unipolar delapan ketukan empat fase motor stepper permanen yang digerakkan oleh magnet. Misalkan Anda sedang mengerjakan sebuah proyek dan membu
Motor adalah komponen penting saat mengubah energi dalam koneksi sistem Anda. Yang penting, bagi penggemar elektronik yang mencari motor, prioritas Anda adalah menemukan motor yang andal dengan efisiensi motor tinggi. Oleh karena itu, artikel ini membahas motor stepper nema23, konfigurasi pinnya, sp
Izinkan kami membantu mengajari Anda cara memilih perusahaan untuk perbaikan motor stepper Anda. Apa itu Motor Stepper? Motor stepper adalah perangkat elektromekanis yang mencapai gerakan mekanis dari konversi pulsa listrik. Alih-alih tegangan yang diberikan secara terus-menerus, ia digerakkan ol
Komponen dan Koneksi Sistem Sherline CNC. Komponen Sistem 1) Handwheel manual 1-5/8″2) Motor stepper sumbu Z3) Dudukan motor stepper4) Mill vertikal Sherline dengan aksesori standar (Model 2000 mill ditampilkan)5) Cadangan CD penginstalan Linux/EMC2, CD instruksi Sherline6) Motor stepper sumbu Y7