Manufaktur industri
Robot industri
Pendahuluan: Baru-baru ini beberapa tahun yang lalu tampaknya penghematan tenaga kerja adalah faktor pendorong di produsen terkemuka untuk menyelidiki otomatisasi. Pengembalian investasi sebagian besar dihitung dengan jumlah orang yang akan digantikan oleh otomatisasi. Dan jika ROI itu kurang dari

Korteks serebral adalah bagian otak yang memproses gambar. Manusia memiliki korteks serebral terbesar dibandingkan mamalia lainnya. Visi superior ini adalah salah satu ciri evolusi yang memberi manusia keunggulan atas hewan lain. Ahli biologi evolusioner mencoba mengungkap misteri di balik sifat ini
Gangguan dengan kamera penglihatan mesin, sensor yang tidak dikalibrasi, atau bayangan yang tidak terduga dapat menyebabkan kesalahan yang berpotensi mahal dan berbahaya dalam sistem AI industri. Namun, para peneliti sedang mengembangkan algoritme pemeriksaan kesalahan serta tindakan sederhana yang
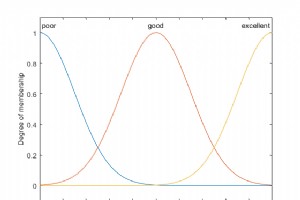
Logika fuzzy mungkin tidak terdengar seperti cara yang paling dapat diandalkan untuk menerapkan sistem kontrol yang kompleks. Namun, kemampuan sistem logika fuzzy untuk bekerja dengan data yang tidak tepat dan menerapkan pengalaman para ahli menjadikannya alat yang ampuh dalam aplikasi kontrol moder

Menggunakan Programmable Logic Controllers (PLCs) untuk Sel Robot Sel-sel robot seringkali memerlukan pengontrol untuk menjalankan bagian-bagian sel yang umumnya tidak berada dalam lingkup kerja robot. Pengontrol, biasanya pengontrol logika yang dapat diprogram (PLC), mengontrol pintu aksila, klem,

Pengontrol logika fuzzy, secara harfiah, ada di sekitar kita. Dari sistem pengereman anti-lock hingga mesin cuci yang membersihkan pakaian kita. Tapi apakah mereka benar-benar bekerja? Dan apa manfaat menggunakannya? Gambar 1. Pemesinan modern sering bergantung pada logika fuzzy untuk mengontrol
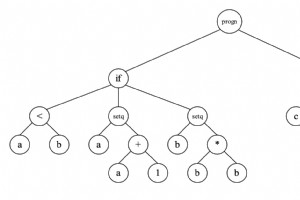
Mungkin Cawan Suci ilmu komputer akan ditemukan pada hari mesin kita dapat menulis programnya sendiri. Pemrograman genetik (GP) adalah paradigma pembelajaran mesin yang relatif baru yang mewakili langkah ke arah itu. GP memegang banyak janji di bidang teknik kontrol. Dalam artikel ini, kita akan m

Revolusi komputer dimulai dengan didirikannya sirkuit terpadu (IC) pada 1960-an. IC menemukan jalannya ke banyak industri selama setengah abad terakhir. Saat ini, ada berbagai perangkat komputasi yang digunakan di berbagai sektor. Awalnya, perangkat lunak digunakan sebagai fasilitator untuk menggu

Robotika industri tidak kekurangan merek, model, warna, bentuk, dan ukuran. Tetapi ketika datang ke desain mekanis, banyak kesamaan terlihat di semua merek. Lengan robot artikulasi industri sering dilihat sebagai gambar yang menggambarkan fasilitas manufaktur berteknologi tinggi. Bahkan robot kola

Memiliki mobil dulunya merupakan bagian mendasar dari kemudahan akses transportasi. Hari ini, seseorang dapat memanggil mobil dengan aplikasi telepon, dan mobil akan tersedia. Anda tidak perlu khawatir tentang perawatan, pemeliharaan, kerusakan, asuransi, atau sejenisnya. Ini dimungkinkan oleh laya

Revolusi Industri Pertama dimulai pada abad ke-18 dengan penemuan dan kemajuan mesin uap. Kemajuan teknologi lebih lanjut membawa produksi massal dan otomatisasi. Teknologi ini mewakili tiga evolusi pertama dari revolusi industri, dengan Industri 4.0 sebagai zaman yang kita jalani sekarang. Atau, ap

Pada titik ini dalam seri pemrograman genetik (GP), kita telah mempelajari tentang apa itu pemrograman genetik dan bagaimana ia merepresentasikan informasi, bagaimana operator genetik bekerja dalam algoritme evolusi, dan bekerja dengan mengembangkan program penyortiran melalui regresi simbolis. Di

Sensor jarak laser memiliki banyak kegunaan dalam industri robotika dan otomasi. Mereka dapat menjangkau banyak aspek industri yang berbeda, tetapi artikel ini berfokus pada retrofit sel untuk teknologi usang menggunakan sensor jarak laser sebagai sensor posisi. Sensor ini bisa sangat akurat dalam
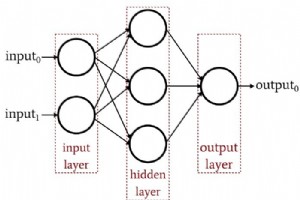
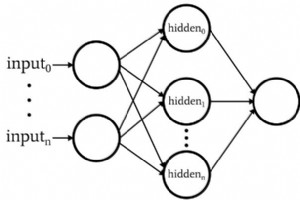
Kami dapat sangat meningkatkan kinerja Perceptron dengan menambahkan lapisan node tersembunyi, tetapi node tersembunyi tersebut juga membuat pelatihan sedikit lebih rumit. Sejauh ini dalam seri AAC pada jaringan saraf, Anda telah mempelajari tentang klasifikasi data menggunakan jaringan saraf, teru
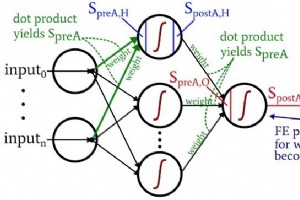
Artikel ini menyajikan persamaan yang kami gunakan saat melakukan perhitungan pembaruan bobot, dan kami juga akan membahas konsep backpropagation. Selamat datang di seri AAC tentang pembelajaran mesin. Ikuti serinya sejauh ini di sini: Bagaimana Melakukan Klasifikasi Menggunakan Jaringan Syaraf T
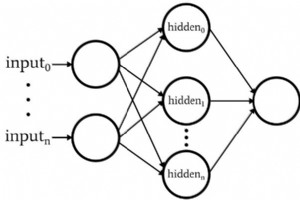
Artikel ini membahas konfigurasi Perceptron yang akan kita gunakan untuk eksperimen dengan pelatihan dan klasifikasi jaringan saraf, dan kita juga akan melihat topik terkait node bias. Selamat datang di rangkaian artikel teknis All About Circuits neural network. Dalam seri sejauh ini—tertaut di baw
Artikel ini membawa Anda langkah demi langkah melalui program Python yang memungkinkan kami melatih jaringan saraf dan melakukan klasifikasi lanjutan. Ini adalah entri ke-12 dalam seri pengembangan jaringan saraf AAC. Lihat apa lagi yang ditawarkan seri ini di bawah ini: Bagaimana Melakukan Klasif
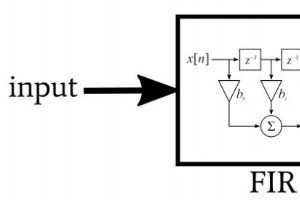
Artikel ini menjelaskan mengapa validasi sangat penting saat kami memproses data menggunakan jaringan saraf. Seri AAC tentang pengembangan jaringan saraf berlanjut di sini dengan melihat validasi dalam jaringan saraf dan bagaimana NN berfungsi dalam pemrosesan sinyal. Bagaimana Melakukan Klasifika
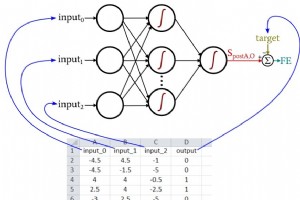
Dalam artikel ini, kita akan menggunakan sampel yang dihasilkan Excel untuk melatih Perceptron multilayer, lalu kita akan melihat bagaimana kinerja jaringan dengan sampel validasi . Jika Anda ingin mengembangkan jaringan saraf Python, Anda berada di tempat yang tepat. Sebelum mempelajari diskusi ar
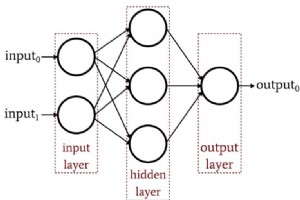
Artikel ini memberikan panduan untuk mengonfigurasi bagian tersembunyi dari Perceptron multilayer. Sejauh ini dalam seri jaringan saraf ini, kita telah membahas NN Perceptron, NN multilayer, dan cara mengembangkan NN semacam itu menggunakan Python. Sebelum kita melanjutkan membahas berapa banyak la
Robot industri